Читайте также:
|
Пусть в некоторой точке твердого тела N действует полное напряжение Pn. Этот вектор можно рассматривать как сумму трех взаимно перпендикулярных векторов P x, P y и P z (рис. 2.4.)
В окрестностях точки N проведем три взаимно перпендикулярные площадки, нормалями которых являются оси координат x, y и z. Для каждой из этих площадок векторы P x, P y и P z можно считать напряжениями, действующими на этих площадках. Каждый из векторов P x, P y и P z можно представить как геометрическую сумму проекций на оси координат: одну нормальную и две касательные (например P x = σx + τ xy + τ xz).
| б) |
| а) |
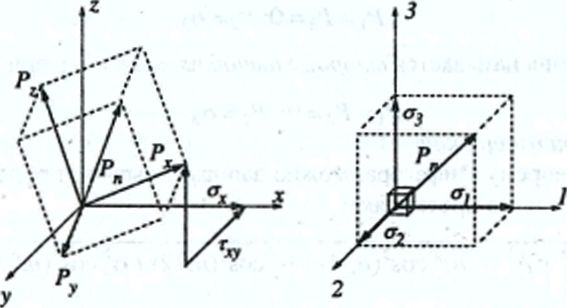
Рис. 2.4. Схема напряженного состояния: а – в обычных осях; б – в главных осях
Попробуем изменить (повернуть) направление осей координат и нормальных к ним площадок таким образом, чтобы направление осей, например Nx, совмещалось с направлением полного вектора напряжения Рх. При этом касательные составляющие полного напряжения Рx обозначенные на чертеже τ xy, τ xz обратятся в нуль. Согласно закону парности напряжений τ xy = τ yx = 0; τxz = τ zx = 0; τ yz = τ zy = 0
Для случая, когда Рх = σ x, Рy = σ y, Рz = σ z, τ xy = τ xz = τ yz = 0, введены обозначения нормальных напряжений σ 1,σ 2,σ 3, которые названы главными. Направления, по которым действуют главные напряжения, называют главными и главными осями.
Существуют девять основных схем главных напряжений: две линейные, три плоские и четыре объемные (рис. 2.5.). Схема нагружений сильно влияет на основное свойство деформируемого металла – пластичность, т. е. на его способность подчиняться пластическим деформациям без признаков нарушения
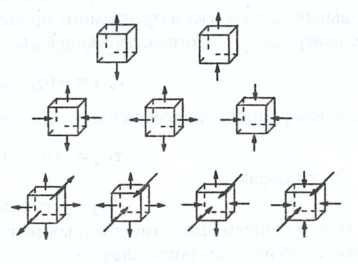
Рис 2.5. Основные схемы главных напряжений
Дата добавления: 2015-09-05; просмотров: 83 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| И ПЛОСКАЯ ДЕФОРМАЦИЯ | | | ИСПЫТАНИЕ МЕТАЛЛОВ НА РАСТЯЖЕНИЕ |