|
Читайте также: |
Встречаются ДТС, в которых, чтобы оценить действия водителя с технической точки зрения, необходимо, пользуясь инженерными расчетами, определить наличие или отсутствие у водителя технической возможности предотвращения данного ДТП путем экстренного объезда препятствия (маневра) или определить возможность совершения такого объезда без нарушения устойчивости (заноса).
Исходные данные, необходимые для решения данного вопроса, содержат характеристики дорожно-климатических условий, автотранспортного средства и самого препятствия, а критериями оценки возможности предотвращения ДТП путем маневра являются линейные и угловые координаты автотранспортного средства: продольное перемещение, поперечное смещение, курсовой угол (см. рис. 6).
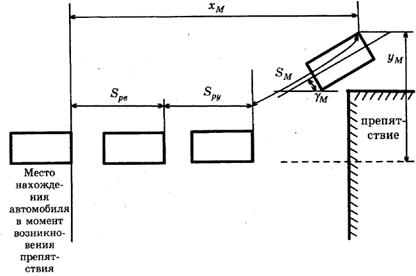
Рис. 6. Схема выполнения маневра при объезде
препятствия автотранспортным средством
Ниже приводится методика расчета для решения вышеуказанного вопроса, основанная на положениях теории автомобиля с использованием исходных данных, полученных при проведении расследования (а также осмотра места ДТП) и выбранных из технической и справочной литературы.
Расчетные схемы и основные методические положения были разработаны доктором наук, профессором В.А. Иларионовым.
Расстояние, проходимое автотранспортным средством за время маневра, состоит из трех отрезков пути (SPВ, SPУ и SM), каждый из которых характеризуется своими обстоятельствами и параметрами.
На рис. 6 показана схема выполнения маневра водителем автотранспортного средства при объезде препятствия.
На отрезке пути SPB, проходимом автотранспортным средством за время реакции водителя, последний оценивает дорожно-транспортную ситуацию и принимает решение о маневре. В конце этого отрезка пути он, воздействуя на рулевое колесо, поворачивает его в сторону предполагаемого маневра, однако в течение времени tpy автотранспортное средство продолжает двигаться прямолинейно на отрезке пути Spy; в этот период происходит выбирание зазоров в рулевом управлении, сжатие демпфирующих пружин в рулевых тягах, угловая деформация шин в сторону маневра, а у автотранспортных средств с усилителем рулевого управления преодолеваются «зоны нечувствительности» усилителя; на отрезке пути SM автотранспортное средство совершает непосредственный маневр при объезде препятствия, оно резко меняет первоначальное направление движения.
В настоящее время в водительской практике существуют три наиболее распространенных вида маневра, иллюстрация которых дана на рис. 7 (а, б, в). Эти виды имеют следующие условные названия:
1. Вход в поворот (рис. 7а). При этом виде маневра водитель только «отворачивает» рулевое колесо для объезда препятствия, не корректируя при этом траекторию движения автотранспортного средства. В результате автотранспортное средство, двигаясь по окружности переменного радиуса, может оказаться в любом месте проезжей части, расположенной с противоположной стороны от препятствия, в случае, если не произошло контакта с препятствием или заноса автотранспортного средства. (При данном виде маневра автотранспортное средство наиболее подвержено заносу (особенно на скользкой дороге) из-за резкого поворота рулевого колеса. Причем направление заноса передней части совпадает с направлением вращения рулевого колеса).
2. Вход - выход (рис. 76). При этом виде маневра водитель, повернув рулевое колесо на определенный угол, затем (при объезде препятствия) дальнейшим поворотом рулевого колеса в противоположную сторону (в сторону препятствия) возвращает управляемые
колеса в нейтральное положение, т.е. автотранспортное средство в этом случае движется по кривой постоянного радиуса.
3. Смена полосы движения (рис. 7в). При этом виде маневра водитель, повернув рулевое колесо в сторону, противоположную местонахождению препятствия (для его объезда) на определенный угол, затем поворачивает его в противоположную сторону до восстановления первоначального прямолинейного движения. В результате этого маневра (в случае отсутствия контакта с препятствием), автотранспортное средство будет продолжать свое движение по соседней полосе справа или слева от препятствия (в зависимости от того, с какой стороны был совершен объезд).
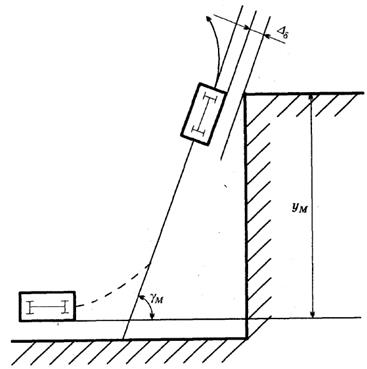
Рис. 7. Основные виды маневра:
а) маневр типа «вход в поворот» (отворот);
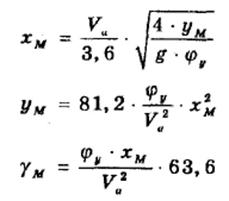
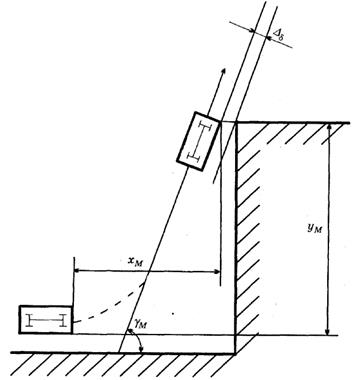
Рис. 7. Основные виды маневра:
б) маневр типа «вход-выход»;
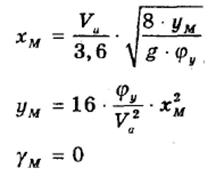
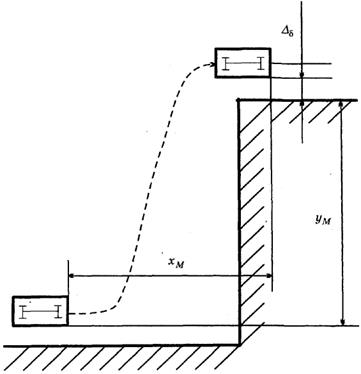
Рис. 7. Основные виды маневра: в) маневр типа «смена полосы движения»
Как отмечалось выше, критериями оценки технической возможности предотвращения ДТП путем маневра являются координаты автотранспортного средства относительно границ проезжей части в конце маневра хм, yм, γ м (см. рис. 6).
Данные критерии имеют следующие определения:
хм - теоретически необходимое продольное перемещение автотранспортного средства при совершении маневра, в результате которого оно отклонилось от прямолинейного движения на определенное поперечное расстояние (смещение), например y м;
yм - поперечное смещение автотранспортного средства в конце маневра, т.е. линейное отклонение от прямолинейного движения в конце маневра;
γ м - курсовой угол автотранспортного средства в конце маневра.
Вышеуказанные критерии связаны между собой зависимостями, показанными на рис. 7 а,б,в.
В этих формулах не учтены следующие факторы: высота центра массы, поперечная упругость шин, конструкция подвески и рулевого управления, - и по этой причине траектория, определенная по указанным формулам, отличается от действительной. Поэтому для корректировки данных величин вводится коэффициент маневра, равный:

Он показывает, во сколько раз фактическое продольное смещение автотранспортного средства (при определенном поперечном смещении γΜ) больше теоретически необходимого.
Этот коэффициент зависит главным образом от скорости автотранспортного средства и сцепных качеств дороги и имеет следующие значения:
для сухого асфальтобетона φ = 0,7 + 0,8; Км = 1,12 + 0,0013 -Va;
для мокрого асфальтобетона φ = 0,35 ÷ 0,45;
Kм = 1,05 + 0,0014- Va;
для обледенелой дороги φ - 0,1 ÷ 0,2; Кч = 1,0 + 0,01 · Va.
Ввиду того, что возникающие при движении автотранспортного средства угловые и поперечные колебания подрессоренных масс (кузова, кабины) приводят к его «рысканию» на проезжей части, ширина полосы движения (динамического коридора), занимаемой им при совершении экстренного маневра, будет всегда шире его габаритной ширины. Ширина указанного коридора определяется следующей формулой:
Bдк=Ba+(0,0028 · Za + 0,01) - Va (2)
Здесь же следует отметить, что в данной формуле учитываются психофизиологические качества водителя.
При выполнении экстренного маневра с каждой стороны автотранспортного средства должен быть сохранен безопасный интервал:

При прямолинейном движении величина этого интервала определяется по формуле:

Входящая в формулы поперечная составляющая коэффициента сцепления φу равна 0,8 φ, если автомобиль движется в тяговом или тормозном режиме, а если накатом, то φу = φ, где коэффициент сцепления φ принимают из справочника НИИАТ для соответствующего дорожного покрытия.
Рассмотрим ниже методику определения технической возможности совершения различных видов маневра.
МАНЕВР «ВХОД В ПОВОРОТ»
Условие безопасного объезда препятствия в этом случае будет следующим:
или, подставляя формулы (1, 2, 3), получим окончательное выражение:
где Sa — удаление автотранспортного средства от препятствия в момент его обнаружения водителем (исходя из объективной возможности его обнаружить). В случае, если величина удаления (Sa) будет больше правой части неравенства (5), то, следовательно, водитель имел техническую возможность совершить объезд препятствия путем маневра «вход в поворот». В случае, если удаление (Sa) будет меньше, то водитель не имел технической возможности совершить объезд препятствия путем маневра «вход в поворот».
Пример. Водитель автомобиля ГАЗ-3110, движущегося со скоростью 60 км/ч с ближним светом фар, обнаружил на расстоянии 50 м впереди стоящий на полосе его движения вплотную у правый границы проезжей части автомобиль ЗИЛ-431410; проезжая часть шириной 5 м для одностороннего движения в заданном направлении, асфальтированная, горизонтального профиля, в сухом состоянии. Транспортные средства на встречной полосе отсутствовали. До наезда водитель автомобиля ГАЗ-3110 двигался в тяговом режиме. Ширина свободной проезжей части около 3,5 м.
Исходные данные, необходимые для расчета:
jy = 0,8 j; = 0,8*0,7 = 0,56; t ру = 0,2 с; tРВ = 1,4 с*;

КМ= 1,12 + 0,0013 * Vа = 1,198
Решение:
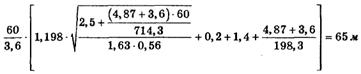
Поскольку удаление автомобиля ГАЗ-3110 (50 м) меньше правой части неравенства (65 м), то, следовательно, водитель автомобиля ГАЗ-3110 не имел технической возможности совершить объезд препятствия путем маневра «вход в поворот», так как в этом случае у водителя было меньшее расстояние до препятствия в момент обнаружения (50 м), чем необходимо для совершения безопасного маневра (65 м).
Здесь следует отметить, что этот вид маневра является наименее безопасным для других участников движения, так как в этом случае водитель только «отворачивает» управляемые колеса в сторону от препятствия, не возвращая их ни в нейтральное положение, ни в положение, обеспечивающее прямолинейное движение автотранспортного средства, поэтому в результате маневра автотранспортное средство оказывается либо на соседней, либо на встречной полосе, где может произойти другое дорожно-транспортное происшествие.
______________________________________________________________________________
* См. табл. П. 3
** См. Справочник НИИАТ.
МАНЕВР «ВХОД - ВЫХОД»
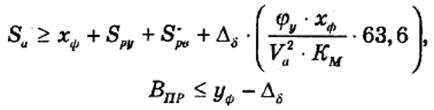
В этом случае условие безопасного объезда препятствия будет определяться следующим неравенством:
Sa≥ хф + SPB + SPУ,
BПP ≤ yn - Δδ (6)
Или, подставляя в вышеприведенные формулы (1, 2, 3), получим окончательное выражение:
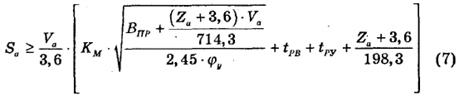
В случае, если величина удаления (Sa) будет больше правой части неравенства (7), то, следовательно, водитель имел техническую возможность совершить объезд препятствия путем маневра «вход-выход». В случае, если удаление (Sa) будет меньше или равно правой части неравенства, то, следовательно, водитель не имел такой возможности.
Пример. Определим техническую возможность совершения объезда препятствия путем маневра «вход-выход» при тех же исходных данных, что и в предыдущем примере.
Подставляя значения исходных данных в неравенство (7), получим:

Поскольку удаление автомобиля ГАЗ-3110 (50 м) меньше правой части неравенства (7), то, следовательно, его водитель не имел технической возможности совершить объезд препятствия путем маневра «вход-выход», так как в распоряжении водителя было расстояние, (50 м) меньшее необходимого для совершения этого маневра (56 м).
МАНЕВР «СМЕНА ПОЛОСЫ ДВИЖЕНИЯ*
Ввиду того, что после завершения этого маневра (безопасного для других участников движения) АТС должно двигаться параллельным курсом (по сравнению со своим первоначальным направлением движения), на проезжей части должно быть свободное пространство, позволяющее ему беспрепятственно двигаться в данном направлении.
С этим требованием связано дополнительное условие при определении технической возможности совершения безопасного объезда препятствия путем маневра «смена полосы движения». Это условие формализуется при:
ВСВ ≥ ВДК (8)
Подставляя значение ВДК, получим:
ВСВ >Ва + (0,0028 · Zа + 0,01) · Vа, (9)
При исследовании данного вопроса необходимо начинать с проверки этого условия.
Если ширина свободной от препятствия проезжей части дороги (ВСВ) меньше ширины динамического коридора (ВДК), то, следовательно, водитель не имел технической возможности предотвратить наезд на препятствие путем маневра «смена полосы движения».
Если же ширина свободной от препятствия проезжей части (BCВ) больше ширины динамического коридора (ВДК), то исследование по этому вопросу следует продолжать, исходя из Следующего неравенства:
Sа>хф+ SPB + SРУ (10)
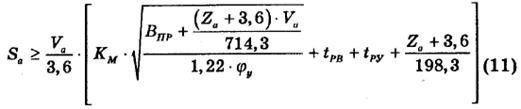
или, подставляя формулы (1, 2, 3, 4), получим:
Если правая часть неравенства (9) будет меньше или равна левой части (Sa), то, следовательно, водитель автотранспортного средства не имел технической возможности совершить безопасный объезд препятствия путем маневра «смена полосы движения». Если же правая часть неравенства больше левой, то следует сделать противоположный вывод.
Рассмотрим пример, основанный на прежних исходных данных. Определим вначале, достаточна ли ширина свободной проезжей части для совершения маневра «смена полосы движения». Эта величина ставит:
1,82 + (0,0028 - 4,87 + 0,01) · 60 = 3,2 м
Поскольку свободная от препятствия ширина проезжей части дороги (3 м) больше динамического коридора, то, следовательно, она позволяет совершить маневр «смена полосы движения» при объезде стоящего у правей обочины автомобиля ЗИЛ-431410.
В этом случае необходимо продолжать исследование дальше, исходя из неравенства (11):


Поскольку правая часть неравенства (71 м) больше удаления автотранспортного средства (50 м), то, следовательно, водитель не имел технической возможности совершить безопасный маневр «смена полосы движения».
Отметим, что маневр «смена полосы движения» наиболее распространен в водительской практике, так как его можно совершить более безопасным для других участников движения способом, по сравнению с предыдущими видами маневров. Это объясняется тем, что после его завершения автотранспортное средство продолжает двигаться прямолинейно, но лишь параллельным курсом.
Дата добавления: 2015-08-27; просмотров: 356 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| В темное время суток | | | Объезд подвижного препятствия (автомобиля, пешехода), движущегося параллельно автотранспортному средству в попутном или встречном направлении |