Читайте также:
|
Расследование дорожно-транспортных происшествий, совершенных в условиях ограниченной видимости (туман, пыль, темное время суток и т.д.) включает в себя, главным образом, решение следующих основных вопросов:
- Соответствовала ли выбранная водителем скорость движения АТС расстоянию видимости дороги?
- Располагал ли водитель АТС технической возможностью предотвратить ДТП в момент возникновения опасности (препятствия) для движения?
— В случае превышения водителем скорости, рассчитанной по дальности видимости дороги, находится ли данное превышение в причинной связи с фактом данного ДТП?
Для того, чтобы дать ответы на поставленные вопросы необходимо знать дальность видимости дороги или расстояние общей видимости (SВД) и дальность видимости препятствия или расстояние конкретной видимости (SВП). Данные величины определяются экспериментально по методикам, изложенным в лекции 4 ч. 1.
1. Для решения первого вопроса определяют скорость, соответствующую расстоянию общей видимости,1 т.е. максимально-допустимую скорость, двигаясь с которой водитель имеет возможность
остановить управляемое им АТС на участке пути, не превышающем расстояние видимости дороги:
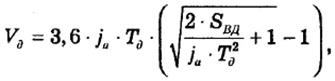
где Тд = t1д+t2 + 0,5*t3
Если фактическая скорость движения АТС не превышает значение VД, делают вывод о соответствии выбранной водителем скорости расстоянию видимости дороги. В случае превышения Vа над VД делают противоположный вывод.
2. Для решения вопроса определяют остановочный путь АТС (S0) при фактической скорости движения АТС и времени реакции водителя, выбираемого в зависимости от характеристики дорожно-транспортной ситуации.
A. В случае наезда, столкновения с неподвижным препятствием S0 сравнивают с Sвп. Если Sо ≥ Sвп делают вывод об отсутствии технической возможности предотвратить ДТП торможением. Если S0 < Sвп, делают противоположный вывод.
Б. В случае наезда, столкновения с препятствием, перемещающимся в попутном (встречном) направлении относительно движения АТС, техническую возможность предотвращения ДТП торможением определяют, как показано ранее, приняв в качестве удаления Sa величину (Sвп).
B. В случае наезда, столкновения с препятствием, пересекающим проезжую часть, определяют удаление АТС от места наезда (столкновения) при фактической скорости движения АТС, как показано ранее.
Затем это удаление (Sa) сравнивают с Sвп. Если Sa< Sвп, определенный остановочный путь сравнивают с рассчитанным удалением и принимают решение о технической возможности, как указано для общего случая исследования ДТП в условиях неограниченной видимости.
Если Sa> Sвn, остановочный путь сравнивают с Sвп. При этом, если Sо ≥ Sвn, делают вывод об отсутствии технической возможности предотвратить ДТП в момент наступления конкретной видимости; если Sо < Sвп, то делают противоположный вывод.
3. Для решения третьего вопроса определяют остановочный путь АТС (Sо) при скорости VД и реагировании водителя на возникшее препятствие (опасность для движения).
Далее сравнением Sо с Sвп или Sa, определенным при фактической скорости (см. п. 2 настоящей Методики), устанавливают гипотетическое наличие или отсутствие технической возможности предотвратить ДТП при скорости VД.
Если вывод о технической возможности при скорости VД изменяется на противоположный относительно такового, установленного по п. 2 настоящей Методики при скорости Va, делают вывод о наличии причинной связи между превышением скорости и фактом ДТП. Если вывод о технической возможности при скорости fa не изменяется на противоположный относительно вывода по п. 2 Методики, делают вывод об отсутствии причинной связи между превышением скорости и фактом ДТП.
Обычно исследование по вопросу 3 целесообразно проводить в случае отсутствия у водителя АТС технической возможности предотвратить ДТП при фактической скорости.
При исследовании ДТП, совершенных в темное время суток, сочетания выводов по всем трем вопросам могут быть самыми разнообразными.
При непревышенной, как и при превышенной скорости, водитель может либо располагать, либо не располагать технической возможностью предотвратить ДТП. Это зависит от сочетания конкретных параметров дорожных условий и ситуации, например 5ВД и SBn, flf Va и Vu. Любое сочетание выводов может быть реальным и обоснованным при правильном выборе и определении исходных и расчетных параметров.
Пример. В темное время суток на загородной дороге при общей видимости дороги Sвд = 30 м передней частью автобуса Икарус-280, без применения торможения был совершен наезд на пешехода. Пешеход с момента выхода на проезжую часть до момента наезда затратил (tп) 3,0 с. Водитель имел возможность обнаружить пешехода на расстоянии SBП - 25 м. Автобус, полностью загруженный пассажирами, технически исправный, следовал по сухой асфальтированной горизонтальной проезжей части со скоростью 55 км/ч,
Решение. Скорость, допустимая по условиям видимости дороги:

где: Тд = t1д+t2+0,5-t3 = 0.6 +0,2 +0,5-0,5= 1,05 с, j = 4,5м/с2. Значения t1, t2, t3 и ja взяты из справочных данных. Следовательно, выбранная водителем скорость в данных условиях превышала допустимую по условиям дальности видимости дороги, равной 30 м.
Остановочный путь автобуса (S0) составляет:
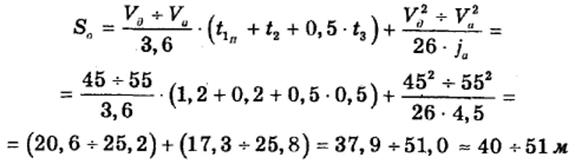
Tп = t1 + t2 + 0,5 · t3П = 1,2 + 0,2 + 0,5 - 0,5 =1,65 с.
Удаление от места наезда равно:
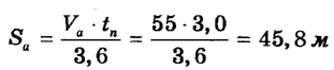
Sa = 45,8 м > SВП = 25 м
Sо = 40 + 51 м > SВП = 25 м
Следовательно, в данном случае водитель не располагал технической возможностью остановить автобус до места наезда торможением в момент наступления конкретной видимости пешехода; поскольку вывод не меняется и при скорости VД = 45 км/ч, превышение скорости не находится в причинной связи с наездом.
НАЕЗДЫ, СТОЛКНОВЕНИЯ В УСЛОВИЯХ ОГРАНИЧЕННОЙ ЗОНЫ ВИДИМОСТИ (ОБЗОРА)
На практике довольно часты ДТП, когда в предшествующей ситуации на определенном участке своего пути объект не находился в поле зрения водителя. В этих случаях видимость впереди автомобиля и по сторонам ограничена, объект некоторое время движется, оставаясь невидимым для водителя, и появляется внезапно для последнего. Такие ДТП особенно часто возникают в сложных условиях. городов с узкими улицами (из-за примыкающих строений, валов снега по краям дороги, стоящих автомобилей) или в сельской местности (из-за зеленых насаждений и т.п.).
Согласно статистическим данным, доля наездов на пешеходов, происшедших в условиях ограниченной зоны видимости (обзор), составляет порядка 20%. Механизм исследования таких ДТП сложнее обычного.
При наличии объекта, ограничивающего обзор, за момент возникновения опасности обычно принимают момент появления пешехода (ТС) из-за этого объекта. Данный момент, или расстояние, преодоленное объектом до места ДТП, можно определить как графическим, так и аналитическим путем. Графический способ заключается в построении схемы (в плане) движения автомобиля и объекта на участке ДТП, на котором участников «расставляют» на расстоянии от места ДТП пропорционально их скоростям с учетом режима движения через определенные фиксированные промежутки времени (например, 1 с). С положения рабочего места водителя проводят лучи через крайнюю габаритную точку объекта, ограничивающего обзор, и определяют то расстояние (Sn) от объекта до места ДТП, на котором объект становится уже виден водителю. Затем это расстояние закладывают в расчет, который проводится по методике, изложенной далее.
При возможности, такой способ определения открытия обзора можно применять и на местности, в реальных условиях совершения ДТП. Аналитический путь решения вопроса о технической возможности предотвращения ДТП в условиях ограниченной зоны видимости (обзора) в общем случае предполагает использование достаточно сложных и громоздких математических расчетов.
Наиболее наглядно решение такого вопроса может быть проиллюстрировано на нижеследующем примере, см. рис. 5, представляющем собой, пожалуй, самый типичный случай ДТП с ограниченной зоной видимости (обзором).
Пример. Технически исправный автомобиль ВАЗ-2108, без пассажиров, совершил наезд на велосипедиста, выехавшего из местного проезда на проезжую часть справа налево по ходу движения автомобиля. Наезд совершен в заторможенном состоянии. Скорость автомобиля (Vа) - 55 км/ч, велосипедиста - (Vп) - 13 км/ч. Вдоль правого края проезжей части по ходу движения автомобиля находится кустарник, ограничивающий водителю видимость вправо. До наезда правые колеса автомобиля двигались в 3,3 м от правого края проезжей части. Велосипедист следова'л по местному проезду на расстоянии (S) - 4 м от кустарника. Наезд совершен серединой передней части автомобиля. Проезжая часть сухая, асфальтированная, горизонтальная. Параметры торможения автомобиля и реакции водителя: tl = 1,2 с, t2= 0,1 с, t3 = 0,4 с (см. табл. П. 3-П. 5); j (экспериментальное) = 6,7 м/с2. После наезда до остановки автомобиль в заторможенном состоянии преодолел (S"Т) 11,5 м. Требуется определить, имел ли водитель автомобиля ВАЗ-2108 техническую возможность предотвратить наезд на велосипедиста торможением в момент появления последнего в поле зрения водителя.
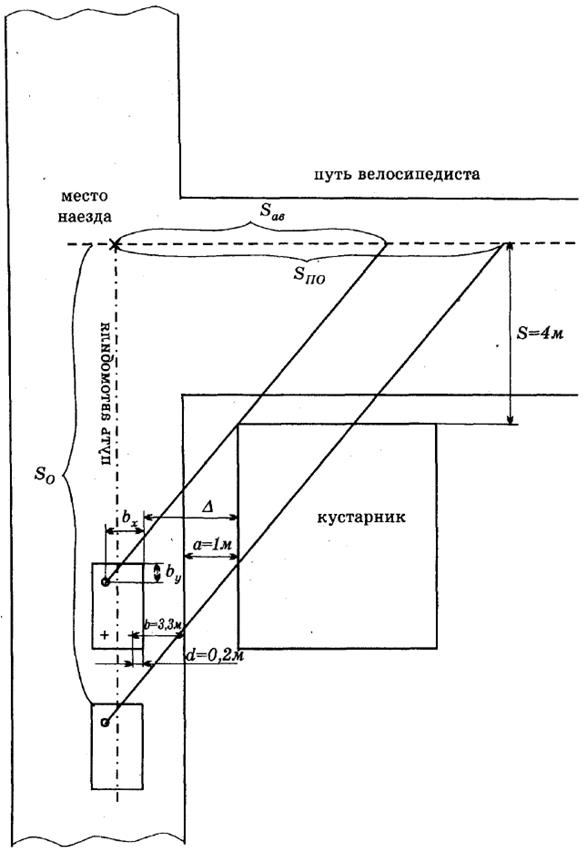
Рис. 5. Наезд на велосипедиста в условиях ограничения зоны видимости (обзора)
Решение:
1. Определяем расстояние (Sno), на котором находился велосипедист от места наезда в момент, когда автомобиль от места наезда находился на расстоянии своего остановочного пути (Sо), т.е. когда водитель еще располагал технической возможностью предотвратить наезд торможением.
Это расстояние при условии, что велосипедист не менял своего темпа и направления движения, определяется по формуле:
В нашем случае указанное расстояние составляет:
Остановочный путь автомобиля ВАЗ-2108 равен:
Если бы наезд был без торможения, то Sno определялось бы проще, как:

2. Определяем расстояние (5ПВ) от велосипедиста до места наезда в момент открытия видимости велосипедиста с рабочего места водителя ВАЗ-2108:
bх=1,9 м; bу=1,3 м; Ш = 1,75 м; К = 1,39 м;
Δ = а + b – d = 1 + 3,3 - 0,2 = 4,1 м,

Геометрические построения, относящиеся к приведенному выше расчету, даны на рис. 5.
Поскольку SПB < SПО, водитель автомобиля ВАЗ-2108 имел объективную возможность обнаружить велосипедиста на расстоянии от места наезда, меньшем остановочного пути, и не располагал технической возможностью предотвратить наезд торможением в момент появления велосипедиста в зоне видимости водителя из-за кустарника, ограничивающего зону видимости (обзор).
Если бы SПВ получилось более SПО, вывод о технической возможности изменился бы на противоположный.
Таким образом, в принципе, может быть исследовано большинство случаев ДТП в условиях ограниченной зоны видимости (обзора).
Многие типовые методики автотехнических исследований автоматизированы. Так, Российским Федеральным центром судебной экспертизы (РФЦСЭ) при Министерстве юстиции РФ разработаны и достаточно широко используются в экспертной практике экспертных учреждений системы МЮ РФ следующие документы: при экспертных исследованиях наездов на пешеходов - программа «Юз». С помощью версии 2 этой программы проводится анализ наездов, происшедших в условиях ограниченной препятствиями зоны обзора с рабочего места водителя автомобиля, совершившего наезд; при исследовании механизма и обстоятельств столкновений ТС - программа «Трасса». Кроме того, специалистами С.-Петербургской центральной лаборатории судебных экспертиз разработана программа «Авто-граф» для послеаварийной реконструкции механизма ДТП с помощью компьютерных графических построений, а Казахстанским НИИ судебной экспертизы - комплексная программа «НАСТ» (наезд - столкновение), используемая для решения экспертных задач еще с конца 80-х годов, и другие программные комплексы.
Обозначения:
Sо - остановочный путь автомобиля, м;
Va - скорость автомобиля, в том числе перед началом торможения, км/ч;
Vn - скорость препятствия (велосипедист, пешеход и т.д), км/ч; Тд - время приведения в действие тормозной системы автомобиля, соответствующее времени tlff, с;
t1, - время реакции водителя в соответствующей дорожно-транспортной ситуации, с;
tlД - минимальное значение времени реакции водителя, с;
t2 - время запаздывания срабатывания тормозного привода автомобиля, с;
t3 - время нарастания замедления автомобиля, с;
ja - замедление автомобиля, м/с2;
Sno - расстояние от велосипедиста до места наезда в момент нахождения автомобиля на расстоянии остановочного пути от того же места, м;
SТ” - расстояние, преодоленное в заторможенном состоянии автомобилем до места остановки после наезда, м;
а - расстояние от правого края проезжей части до кустарника, м;
Ъ - расстояние от правых колес автомобиля ВАЗ-2108 до правого края проезжей части, м;
d - расстояние от правых колес автомобиля ВАЗ-2108 до его правого габарита, м;
Δ- расстояние от правого габарита автомобиля до кустарника, м;
S - расстояние от линии движения велосипедиста до кустарника, м;
Ш - габаритная ширина автомобиля ВАЗ-2108, м;
К - колея автомобиля ВАЗ-2108, м;
SВД - расстояние общей видимости (дальность видимости дороги), м;
SВП - расстояние конкретной видимости (дальность видимости препятствия), м;
VД – макс. допустимая скорость, соответствующая расстоянию общей видимости, км/ч;
ja1 - замедление переднего автомобиля, м/с2;
ja2 - замедление заднего автомобиля, м/с2;
t2l и t22 - время запаздывания срабатывания тормозной системы переднего и заднего автомобилей соответственно, с;
t31 и t32 - время нарастания замедления переднего и заднего автомобилей соответственно, с;
Sa - удаление АТС от места наезда (столкновения) в момент возникновения опасности (препятствия) для движения, м;
Sn - расстояние, преодоленное пешеходом (препятствием) с момента возникновения опасности (препятствия) для движения до момента наезда, м;
tn - время движения пешехода с момента возникновения опасности (препятствия) для движения до места наезда, с;
t'T - время движения АТС в заторможенном состоянии до наезда, с;
ST” - расстояние, преодоленное АТС в заторможенном состоянии после наезда до остановки, м;
SЮ - длина следов торможения колес до полной остановки АТС, м;
α - наименьший угол между направлением движения препятствия, удаляющегося (приближающегося) от ТС и продольной осью дороги, град;
bх, by - расстояния от рабочего места водителя до соответственно передней части и правого габарита автомобиля ВАЗ-2108, м;
SПВ - расстояние от велосипедиста до места наезда в момент открытия видимости велосипедиста с рабочего места водителя автомобиля ВАЗ-2108, м.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. В чем состоит общий методический принцип решения экспертом вопроса о наличии у водителя технической возможности предотвратить наезд (столкновение)?
2. Какие варианты расчетов существуют для определения величины удаления АТС от места ДТП в различные моменты развития ситуации?
3. В чем заключается методический принцип расчета технической возможности предотвратить ДТП путем сравнения временных параметров? Всегда ли он применим?
4. Каков физический смысл формул, по которым рассчитывается техническая возможность предотвращения попутных столкновений АТС?
5. Какие вопросы решаются экспертом при расследовании ДТП, совершенных в темное время суток?
6. Какой способ в основном применяется экспертами при расследовании ДТП, происшедших в зоне ограничения обзора?
ЛИТЕРАТУРА
1. Байетт Р., Уоттс Р. Расследование дорожно-транспортных происшествий /Пер. с англ. - М.: Транспорт, 1983.
2. Бекасов ВА. Автотехническая экспертиза. - М.: Юрлит, 1967.
3. Боровский Б.Е. Безопасность движения автомобильного транспорта. Анализ дорожных происшествий. Л.: Лениздат, 1984. 4. И Ларионов ΒΛ. Экспертиза дорожно-транспортных происшествий. Учебник. - М.: Транспорт, 1989.
5. Расследование дорожно-транспортных происшествий. Вопросы безопасности дорожного движения. Порядок возмещения материального ущерба и морального вреда / Под общей ред. В.А. Алферова, В.А. Федорова. - М.: Лига-Разум, 1998.
6. Суворов Ю.В. Судебная дорожно-транспортная экспертиза. Технико-юридический анализ причин ДТП и причинно-действующих факторов. Учеб. пособие. - М.: Приор, 1998.
7. Суворов Ю.В., Чава И.И. Судебная дорожно-транспортная экспертиза. Экспертное исследование обстоятельств ДТП, совершенных в нестандартных ДТС и особых дорожных условиях. - М.: РФЦСЭ, 2002.
Дата добавления: 2015-08-27; просмотров: 320 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Наезды на встречное препятствие | | | РАСЧЕТ ПАРАМЕТРОВ МАНЕВРА ТС |