Читайте также:
|
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| БГТУ. 210104. 09. 000. ПЗ |

так как постоянные времени форсирующего звена первого порядка
 и инерционного звена первого порядка
и инерционного звена первого порядка  малы, то влиянием этих звеньев можно пренебречь:
малы, то влиянием этих звеньев можно пренебречь:

За  принимаем минимальное из постоянных времени интегрирования нескорректированной системы, т.е.
принимаем минимальное из постоянных времени интегрирования нескорректированной системы, т.е.  . Значит желаемая передаточная функция будет выглядеть следующим образом:
. Значит желаемая передаточная функция будет выглядеть следующим образом:
Передаточная функция упрощенного корректирующего устройства:
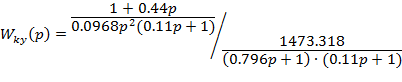


Упрощенный регулятор включает в себя два пропорционально- интегрирующих звена:


| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| БГТУ. 210104. 09. 000. ПЗ |
На рис.14 представлена модель скорректированной системы.
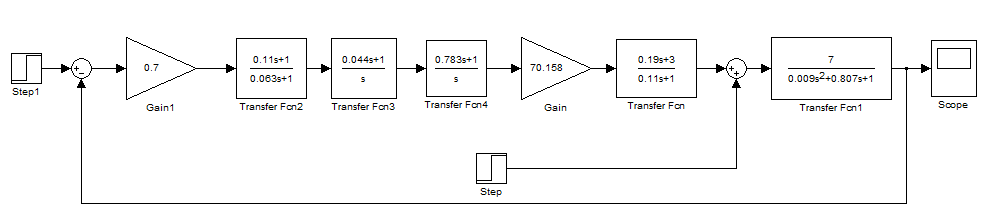
Рис.14. Схема скорректированной САУ в MatLab
1.)При отсутствии возмущений для граничных значений g.
1.1.)При  результат моделирования представлен на рис.15.
результат моделирования представлен на рис.15.
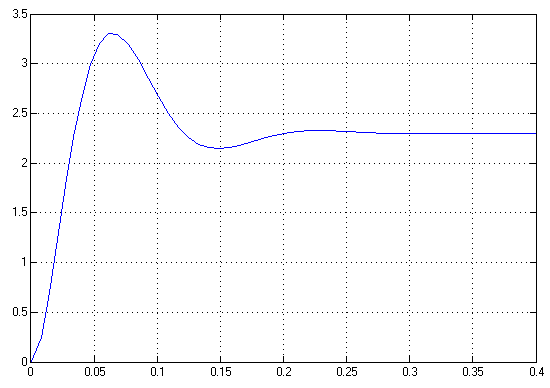
Рис.15. Результат моделирования при 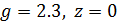
Время переходного процесса: 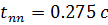
Время регулирования: 
Перерегулирование:

Колебательность: N = 3
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| БГТУ. 210104. 09. 000. ПЗ |
 результат моделирования представлен на рис.16.
результат моделирования представлен на рис.16.
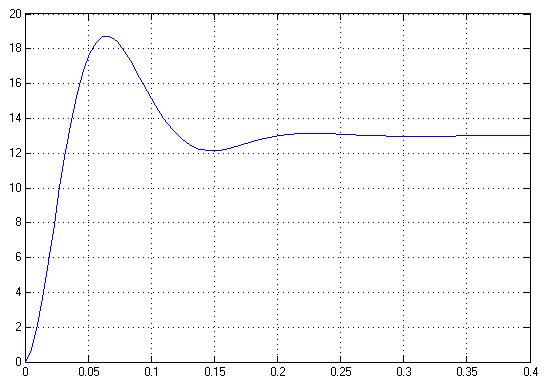
Рис.16. Результат моделирования при 
Время переходного процесса: 
Время регулирования: 
Колебательность: N = 3
Перерегулирование: 
2.)При действующих максимальных и минимальных возмущениях z для граничных значений g.
2.1.) При  результат моделирования представлен на рис.17.
результат моделирования представлен на рис.17.
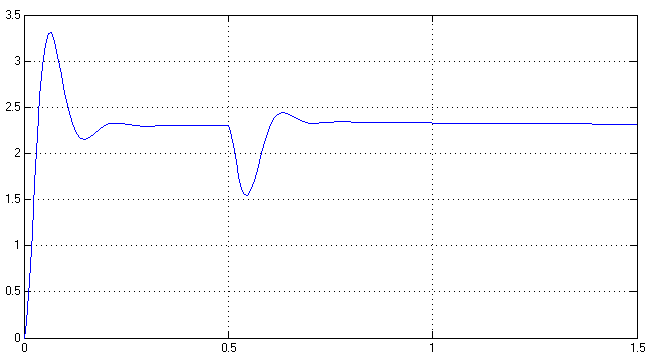
Рис.17. Результат моделирования при 
Время переходного процесса: 
Время регулирования: 
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| БГТУ. 210104. 09. 000. ПЗ |
Максимальная динамическая ошибка:

| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| БГТУ. 210104. 09. 000. ПЗ |
 результат моделирования представлен на рис.18.
результат моделирования представлен на рис.18. 
Рис.18. Результат моделирования при 
Время переходного процесса: 
Время регулирования: 
Колебательность: N = 2
Максимальная динамическая ошибка:

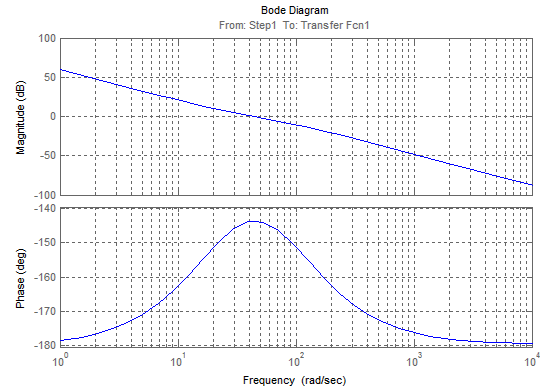
Построим с помощью пакета MatLab логарифмические амплитудную частотную характеристику (ЛАЧХ) и фазово-частотную характеристику (ЛФЧХ) для разомкнутой скорректированной системы. Результаты моделирования представлены на рис.19.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| БГТУ. 210104. 09. 000. ПЗ |
Частота единичного усиления:

Частота сопряжения:


Запас по фазе: 
Запас по амплитуде 
Дата добавления: 2015-08-27; просмотров: 62 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Синтез корректирующего устройства, обеспечивающего настройку исходной системы на симметричный оптимум. | | | Моделирование переходных характеристик упрощённой САУ, скорректированной на симметричный оптимум. |