Читайте также:
|
Построение регулятора для постоянного задающего воздействия.
Рассматривается задача стабилизации ОУ при постоянном задающем воздействии 
Стабилизация обеспечивается пропорциональным регулятором: 
где  - коэффициенты обратной связи.
- коэффициенты обратной связи.  -коэффициент передачи.
-коэффициент передачи.
По заданным показателям качества, используя метод стандартных переходных функций, выберем подходящий характеристический полином замкнутой системы.
Для σ= 0 % и с учетом порядка ОУ n=2,биноминальный полином имеет вид

Для  0.5 с:
0.5 с: 
Характеристический полином замкнутой системы:

Эталонная модель:

Решим матричное уравнение Сильвестра относительно матрицы М и нахйдем матрицу обратных связей  .
.


 - коэффициент прямой связи, позволяет добиться нулевой установившейся ошибки.
- коэффициент прямой связи, позволяет добиться нулевой установившейся ошибки.
Рисунок 3.1– Модель СУ с регулятором для постоянного задающего воздействия .
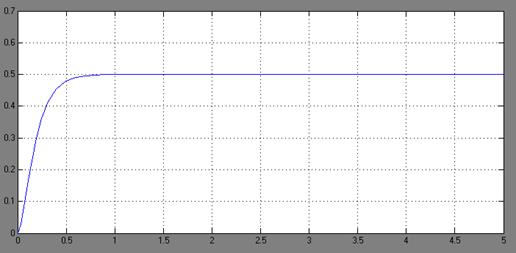
Рисунок 3.2– Результат моделированияСУ с регулятором для постоянного задающего воздействия .
Построение регулятора для линейнонарастающего задающего воздействия.
Задача слежения сводится к задаче стабилизации нулевого значения ошибки слежения.
Для сведения ошибки слежения к нулю построим комбинированный регуляторвида:

Для нахождения матриц LиMнеобходимо решить систему:
Модель линейно возрастающего задающего воздействия в форме ВСВ:



Найдем матрицы L и M:

Рисунок 3.3– Модель СУ с комбинированным регулятором для линейно возрастающего задающего воздействия
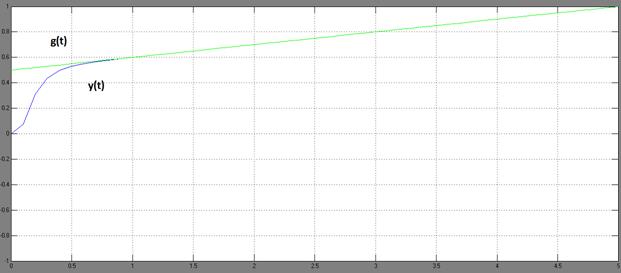
Рисунок 3.4–Результат моделирования СУ с комбинированным регулятором для линейно возрастающего задающего воздействия

Рисунок 3.5–Вектор ошибки слежения СУ с комбинированным регулятором.
tп=0.5с –время переходного процесса
σ=0% - перерегулирование.
Построение регулятора для квадратично-нарастающего сигнала 
Модель воздействия в форме ВСВ:



Рисунок 3.6– Модель СУ с комбинированным регулятором для квадратично-нарастающего задающего воздействия
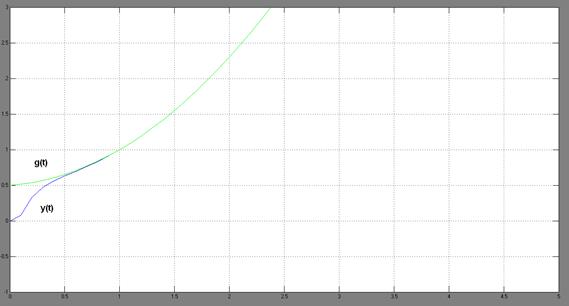
Рисунок 3.7–Результат моделирования СУ с комбинированным регулятором для квадратично-нарастающего задающего воздействия

Рисунок 3.8–Вектор ошибки слежения СУ с комбинированным регулятором.
tп=0.5с –время переходного процесса
σ=0% - перерегулирование.
Построение регулятора длягармонического воздействия:

Модель воздействия в форме ВСВ:


Начальные условия: 


Рисунок 3.9– Модель СУ с комбинированным регулятором для гармонического воздействия:
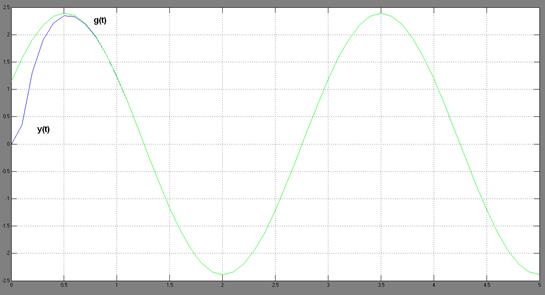
Рисунок 3.10–Результат моделирования СУ с комбинированным регулятором для гармонического воздействия:
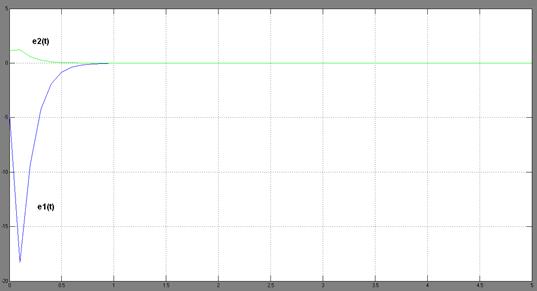
Рисунок 3.11–Вектор ошибки слежения СУ с комбинированным регулятором.
tп=0.5с –время переходного процесса
σ=0% - перерегулирование.
Дата добавления: 2015-07-20; просмотров: 62 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Анализ свойств устойчивости систем управления | | | Построение регуляторов с устройствами оценки. |