Читайте также:
|
Система СВС (рис.1) выполняет следующие функции:
- измеряет и индицирует:
- барометрическую высоту относительно установленного давления Нотн и Н760;
- истинную воздушную скорость Vист.;
- число М;
- выдает сигналы:
- отклонение от заданной высоты «ΔΗ» или от заданного числа М «ΔМ» в канал тангажа системы САУ-154-2 для обеспечения режимов стабилизации заданной высоты или числа М, включаемых на пульте ПУ-46;
- истинной воздушной скорости VИСТ В НВУ-Б3 сер.04 для расчета параметров ветра и счисления координат места ВС при отказе ДИСС-013;
- барометрической высоты HИСТ или H760 в самолетный ответчик в зависимости от его режимов работы;
- «+27 В» при установке стандартного давления Р0=760±1 мм рт.ст. в самолетный ответчик и в МСРП-64М-2;
- обеспечивает индикацию путевой скорости, измеряемой системой ДИСС-013.
Электропитание системы СВС-ПН-15-4Б осуществляется:
- постоянным током напряжением 27В;
- переменным током напряжением 115В, частотой 400Гц;
- переменным током напряжением 36В, частотой 400Гц.
Автоматы защиты «СВС питание, обогрев, вентиляция» на левой панели АЗС, выключатели «СВС-ПН питание, обогрев» на верхнем электрощитке пилотов.
Время готовности при температурах наружного воздуха:
выше -300 С 15 мин.;
ниже -300 С 30 мин.
Принцип действия системы СВС-ПН-15-4Б сер.2
Система имеет отдельные каналы вычисления высотно-скоростных параметров полета: H760, HОТН, VИСТ, M, ΔΗ, ΔM.
Значения высоты, скорости и числа М непрерывно рассчитывает вычислитель ВСМВ-Ι-15М по информации:
- РПОЛ от левого нижнего ППД-1М;
- РСТ от третьей статической магистрали;
- Наэр сигнала установленного давления на УВО-15МΙБ командира ВС;
- Т0С сигнал температуры наружного воздуха от приемника П-5.
Элементы, входящие в состав систем типа СВС—ПН представлены на рис. 14.3. Вычислитель скорости, числа М и высоты ВСМВ работает при подаче на его вход сигналов: давлении Р и Рп от приемников воздушных давлений;

Рис. 1. Структурная схема системы воздушных сигналов СВС-ПН-15-4Б
температуры торможения Тт в виде омического сопротивления R т от приемника температуры заторможенного потока; высоты Нз заданного уровня Земли от указателя относительной барометрической высоты УВО. Ввод сопротивления, пропорционального высотеНз, как функции давления Рз на заданном уровне Земли, осуществляется функциональным потенциометром, воспроизводящим
функцию Нз =f(Рз), при вращении ручки ввода Рз на лицевой части указателя УВО.
Вычислитель ВСМВ предназначен для решения и выдачи в виде напряжений сигналов, пропорциональных Н, Н отн, М и V.
 (при Н≤11 км)
(при Н≤11 км)
 для высот 11 ≤ Н ≤ 20 км
для высот 11 ≤ Н ≤ 20 км
 M= Vu/a,
M= Vu/a,
где k=Cp/Cv=1.4,  ,
,
 где ξ – коэффициент торможения воздуха,
где ξ – коэффициент торможения воздуха,
Тт- температура заторможенного потока.
Функциональная схема вычислителя ВСМВ приведена на рис. 2. Вычислитель состоит из индукционных датчиков статического и динамического давлений ДДСИ и ДДДИ, функциональных преобразователей напряжения ПНФ, полупроводниковых усилителей У, трансформаторов Т. В вычислителе ВСМВ при решении приведенных выше зависимостей используется метод суммирования электрических сигналов. Этим объясняется логарифмирование параметров, входящих в расчетные зависимости.
Как отмечалось выше, зависимости прогибов УЧЭ датчиков ДДСИ и ДДДИ в функции от давлений меняются по логарифмическому закону. Характеристики индукционных преобразователей этих датчиков являются линейными. В связи с этим характеристики датчиков ДДСИ и ДДДИ по давлениям в целом меняются по логарифмическому закону.
В целях упрощения изложения в тексте и в схеме на рис. 2 коэффициенты пропорциональности опущены.
Основные функциональные преобразования в соответствии с расчетными формулами осуществляются преобразователями ПНФ (ПНФ1 и ПНФ2 —для ДДСИ, ПНФЗ— для ДДДИ). С помощью ПНФ4 получается сигнал в виде напряжения U9, пропорционального числу М. ПНФ5 в канале скорости V позволяет получить сигнал в виде напряжения U12 = f (М)V.

Рис. 2. Функциональная схема вычислителя ВСМВ
Этот сигнал подается через усилитель У11 на первичную обмотку трансформатора. В приведенной схеме (рис. 3) напряжение Uвх пропорционально функции f (М)V, а отношение RТ/(R+RТ) пропорционально квадратному корню из Тт. Поэтому выражение Uвых=(Uвх*RТ)/(R+RТ) определяет скорость V. После суммирования с начальным напряжением U06 это напряжение (U13) через усилитель У12 и размножающий трансформатор Т4 поступает к потребителям.
Полупроводниковые усилители У1—У12 предназначены для усиления сигналов по мощности и напряжению.

Рис. 3. Схема умножения мощью трансформатора
С трансформаторов начальных значений, не показанных на рис. 2, в каналы параметров Н, Н отн, М и V вводятся сигналы U01— U06 начальных напряжений для компенсации ненулевых остаточных сигналов и фазовых искажений в каналах системы.
На входы усилителей У1, У4, У6 могут подаваться контрольные сигналы Uэт1 и Uэт2 встроенного контроля, соответствующие тестовым значениям Р и Р дин. Ко вторичной обмотке трансформатора ТЗ вместо сопротивления RТ подключается в этом случае сопротивление RЭТ.
Вычислитель питается через фильтр Ф по переменному току (115 В, 400 Гц) (рис. 4) и через блок питания БП по постоянному току. Напряжения, пропорциональные параметрам Н, Н отн, V, преобразуются в соответствующие сопротивления блоками БПнП.

Рис. 4. Структурная схема системы типа СВС-ПН
Сигнал, пропорциональный ΔМ, выдается блоком коррекции числа М БКМЭ при подаче на его вход команды «коррекция» и сигнала переменного тока частотой 400 Гц, пропорционального числу М.
Сигналы в каналах Н отн, V, М усиливаются блоками питания с усилителями БПУ, работающими в комплектах с указателями УВО, воздушной и путевой скорости УСВПк, числа М УМ. При соответствующей установке переключателя на указателе УСВПк системы СВС—ПН дают возможность индикации путевой скорости V п по данным доплеровского измерителя ДИСС.
Рассмотрим основные функциональные элементы систем типа СВС-ПН.
Датчики ДДСИ и ДДДИ имеют одинаковые принципиальные схемы. Они отличаются лишь УЧЭ: в ДДСИ применяется анероидная коробка, а в
ДДДИ—манометрическая коробка. Рассмотрим принципиальную электрическую схему датчика ДДСИ (рис. 5). В датчике имеются два индукционных преобразователя.

Рис. 5. Принципиальная схема датчика статического давления типа ДДСИ
Каждый индукционный преобразователь состоит из двух неподвижных первичных обмоток L1, L2 (L3, L4), включенных встречно, и подвижной вторичной обмотки L5 (L6). Вторичная обмотка перемещается жестким центром анероидной коробки Е. Обмотки L5, L6 включены последовательно. Перемещение жестких центров анероидных коробок встречное, что позволяет исключить погрешности от ускорений вдоль осей обмоток.
Изменение статического давления Р приводит к перемещению подвижных обмоток относительно неподвижных. В них наводятся ЭДС, которые суммируются. С выхода датчика снимается напряжение U1=f(lg Р).
В целях уменьшения температурных погрешностей датчика используется термостатирование с помощью нагревательного элемента В, реле К5 и биметаллических термоэлементов S1 и S 2. Поддерживаемая температура +45 ±5° С. При увеличении температуры элемент S1 разрывает цепь питания реле К5. При отказе элемента S1 и температуре +60° С срабатывает элемент S 2.
Смещение нуля выходного сигнала устраняется мостиковым термокомпенсатором I рода, состоящим из резисторов R9—R12. Изменение наклона характеристики датчика компенсируется термокомпенсатором II рода с помощью резисторов R7, R8.
Преобразователи ПНФ. Заданная функция Uвых = f (Uвх) в преобразователях ПНФ воспроизводится методом кусочно-линейной аппроксимации. Преобразователи ПНФ состоят из отдельных ячеек, каждая из которых рассчитана на аппроксимацию функции одним отрезком. Так как все решаемые зависимости на рабочих участках представляются вогнутыми либо выпуклыми, рассмотрим преобразователи ПНФ для воспроизведения этих двух видов функций.
На рис. 14.7 а представлена схема ПНФ постоянного тока. При Uвх = 0 все ячейки заперты опорными напряжениями источников G1—G N. При увеличении Uвх напряжение Uвых на выходе растет линейно, причем наклон первого участка (рис. 6, б) определяется резисторами R1, Rн. При Uвх =U1 ≥ Ug1 открывается и резистор R2 шунтирует резистор Rн. Крутизна характеристики меняется. Остальные ячейки работают так же.


Рис. 6. Возможная схема функционального преобразователя ПНФ:
а —схема преобразователя постоянного тока для воспроизведения выпуклых функций; б—выпуклая функция
На рис. 7, а приведена схема ПНФ переменного тока для воспроизведения выпуклых функций. Схема состоит из ячеек с резисторами и диодами. Количество ячеек соответствует числу аппроксимирующих отрезков. Опорные напряжения каждой пары диодов ячеек по абсолютной величине равны между собой. Выходное напряжение снимается с резистора Rн. Конденсатор С предназначен для регулировки фазы Uвх.
Точность воспроизведения характеристик зависит от числа аппроксимированных участков заданной функции, а следовательно, числа ячеек ПНФ.
 Рис. 7. Возможные схемы функциональных преобразователей переменного тока:
Рис. 7. Возможные схемы функциональных преобразователей переменного тока:
а — схема для воспроизведения выпуклых функций: б — схема для воспроизведения вогнутых функций; в—вогнутовыпуклая функция f{M)y'. s—схема для воспроизведения функции /'(-К)
Блок БПнП (рис. 8,а) построен по принципу самобалансирующейся мостовой схемы. Блок состоит из электрического моста, усилителя У, двигателя-генератора ДГ, потенциометра отработки Пос, выходных потенциометров Пвых.
Поступающее на вход напряжение Uвх из вычислителя сравнивается с помощью мостовой схемы с напряжением, снимаемым с потенциометра Пос. Сигнал рассогласования через усилитель У поступает на управляющую обмотку двигателя-генератора ДГ, вращение которого передается на щетки потенциометров Пос и Пвых и продолжается, пока существует это рассогласование. Сопротивление потенциометров Пвых при этом соответствует входному напряжению.
В схеме используется лекальный корректор (на рисунке не показан), предназначенный для компенсации систематических инструментальных погрешностей. Дополнительный поворот щеток потенциометров Пос и Пвых на величину поправки обеспечивается регулировкой профиля лекала корректора.
Для улучшения работы следящей системы в динамическом режиме в схеме использовано напряжение отрицательной обратной связи, выдаваемое генераторной обмоткой двигателя-генератора ДГ.
.

Рис. 8. Функциональные схемы блоков БПнП (а) и БКМЭ (б)
Блок БКМЭ (рис. 14.9,6) выдает сигнал, пропорциональный ΔМ, в виде напряжений постоянного и переменного тока при подаче команды на включение коррекции.
На вход блока поступает сигнал, пропорциональный числу М, в виде напряжения переменного тока частотой 400 Гц. В режиме слежения сигнал сравнивается с сигналом, снимаемым с индукционного преобразователя угла ИП. Сигнал рассогласования ΔU через усилитель У подается на обмотку управления двигателя-генератора ДГ, выходной вал которого через редуктор Р' вращает подвижный элемент ИП и щетки выходных потенциометров П. Вращение продолжается, пока сигнал рассогласования не станет равным нулю. Каждому значению числа М в режиме слежения соответствует определенное значение выходного сопротивления R потенциометров П. Назначение генераторной обмотки Г такое же, как и в блоке БПнП.
Режим коррекции включается при подаче сигнала «коррекции» (+27 В) на обмотку реле К1. При этом к выходу усилителя У подключается фазочувствительный усилитель ФЧУ, двигатель-генератор отключается. В результате при изменении сигнала на входе блока БКМЭ на выходе ФЧУ появятся сигналы, пропорциональные ΔМ. При снятии сигнала «коррекции» блок БКМЭ продолжает работать в режиме слежения.
Указатель УВО (рис. 9) состоит из канала отработки и индикации величины Нотн и канала выдачи относительного сопротивления, пропорционального величине Нз как функции давления Рз.
Канал Нотн построен по принципу самобалансирующейся мостовой схемы. Поступающий с выхода вычислителя электрический сигнал Uвх, пропорциональный величине Нотн, с помощью двигателя М отработки и редуктора Р1 преобразуется в угловое перемещение стрелок и барабанов счетчика Сч. Одновременно двигатель перемещает щетку потенциометра В1 обратной связи и меняет напряжение U вг в диагонали ВГ моста.

Рис. 9. Принципиальная схема указателя УВО
Управляющий сигнал на обмотку ОУ двигателя М следящей системы подается с усилителя блока БПУ, на вход которого поступают разность напряжений Uвх и Uвг, а также сигнал скоростной обратной связи с обмотки ОС генератора G. Малая стрелка на лицевой части указателя служит для отсчета километров, а большая—десятков и сотен метров. Счетчик показывает высоту в километрах.
В равновесном положении схемы Uвх = -Uвг и напряжение на входе блока БПУ равно нулю. Каждому значению Нотн соответствует определенное положение щетки потенциометра В1 и угол поворота стрелок указателя и барабанов счетчика.
Канал Нз состоит из потенциометра В2, редуктора Р2 и счетчика Сч. Давление Рз вводится кремальерой, с которой связаны счетчик и щетка функционального потенциометра В2, выдающего в вычислитель ВСМВ сигнал Нз =f(Рз).
Обмотки OB1, OB2 являются обмотками возбуждения двигателя и генератора, резисторы R3, R4, R6 —юстировочные.
Указатели УСВПк и УМ с блоками БПУ также построены по принципу самобалансирующейся мостовой схемы, их работа аналогична работе указателя УВО с блоком БПУ.
В указателе УСВПк в зависимости от положения переключателя «Возд.—Пут.» на фланце указателя следящая система указателя подключается к вычислителю системы СВС или ДИСС.
Блоки БПУ обеспечивают усиление сигналов рассогласования в каналах Нотн , V, числа М и питание обмоток возбуждения двигателя и генератора в следящей системе. Блок БПУ состоит из полупроводникового усилителя, трансформатора и конденсатора, обеспечивающего сдвиг фаз на 90° напряжений обмоток возбуждения и управления двигателя. Полупроводниковый усилитель имеет два каскада предварительного усиления, фазовый фильтр, предоконечный каскад усиления и выходной усилитель мощности.
Блок питания БП предотвращает амплитудные выбросы бортсети постоянного тока. Принцип стабилизации напряжения в блоке основан на сравнении выходного напряжения с опорным напряжением. Разность этих напряжений через усилитель обратной связи управляет регулирующим элементом. Блок питания состоит из выпрямителей и стабилизатора напряжения на полупроводниковых элементах.
Фильтр Ф уменьшает нелинейные искажения напряжения бортового источника питания 115 В 400 Гц ±2%. Он состоит из последовательного и параллельного, колебательных контуров LC, настроенных на резонанс с частотой 400 Гц. Последовательный контур для частоты 400 Гц имеет минимальное сопротивление, параллельный — максимальное сопротивление. Коэффициент передачи фильтра на частоте 400 Гц близок к единице. На частотах выше 400 Гц коэффициент передачи фильтра резко уменьшается.
 Канал высоты. В вычислителе ВСМВ изменение статического давления воспринимается анероидом и преобразуется индуктивным датчиком в электрический сигнал Н760. (рис. 10)
Канал высоты. В вычислителе ВСМВ изменение статического давления воспринимается анероидом и преобразуется индуктивным датчиком в электрический сигнал Н760. (рис. 10)
Рис. 10. Канал высоты СВС-ПН
Сигнал НОТН формируется как алгебраическая сумма сигналов Н760 и Наэр (Р0) по установленному давлению на УВО-15МΙ командира ВС. Сигнал HОТН выдается на указатель УВО-15МΙ. Значение высоты индицируется стрелкой по шкале от 0 до 1000 м, а сотни метров и километры – по счетчику в диапазоне от 0 до 15000 м. Кремальера связана с барометрическим счетчиком с диапазоном от 525 до 810 мм рт.ст.
При установке Р0=760±1 мм рт.ст в указателе замыкаются контакты и выдается сигнал «+27 В» в самолетный ответчик и МСРП-64М-2 для контроля правильности установки стандартного давления. Кроме того, в указателе вычисляется сигнал Н760 как алгебраическая сумма сигналов НОТН и Наэр. В самолетный ответчик в зависимости от его режимов работы выдаются сигналы НОТН и Н760.
Канал числа М. Сигнал числа М формируется из сигналов динамического и статического давления (рис. 11), выдается на блок БКМЭ-Ι и на указатель УМ-Ι-0,89 со шкалой от 0,3 до 1,0 через 0,01.
При достижении индикации числа М  0,88+0,01 в указателе замыкаются контакты и включается два светосигнализатора «Предел скорост.».
0,88+0,01 в указателе замыкаются контакты и включается два светосигнализатора «Предел скорост.».
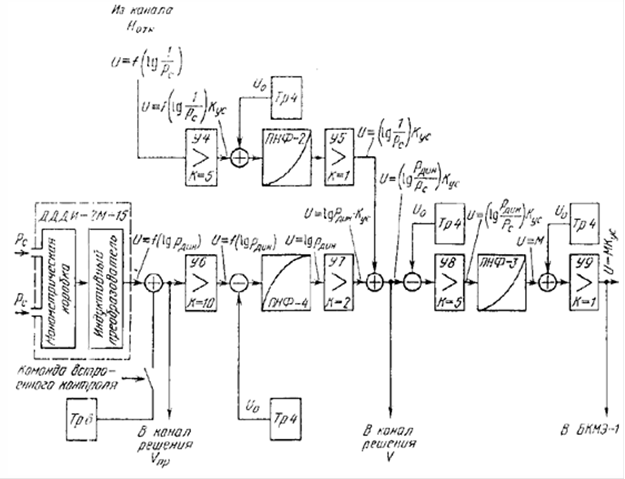
Рис. 11. Канал числа М СВС-ПН
Канал VИСТ. Сигнал VИСТ формируется из сигнала числа М с автоматическим учетом фактической температуры наружного воздуха (рис. 12).
Сигнал VИСТ выдается на указатель УСВП и через блок БПНП-10 в НВУ. Если переключатель «В-ΙΙ» установлен в положение «В», то в окне видна надпись «Возд.», и прибор индицирует истинную воздушную скорость от вычислителя ВСМВ-Ι-15М. При установке переключателя в положение «ΙΙ» в окне видна надпись «Пут.», и прибор индицирует путевую скорость, измеряемую системой ДИСС-013. Шкала указателя от 0 до 1000 км/ч. При полном обороте стрелки в верхнем окне появляется цифра Ι.
 Рис. 12. Канал высоты СВС-ПН
Рис. 12. Канал высоты СВС-ПН
Канал ΔΗ. Сигнал ΔΗ формируется в двух корректорах заданной высоты КЗВ-0-15 (рис. 1), которые представляют собой барометрические электромеханические датчики высоты. На КЗВ-0-15 подается статическое давление, и корректор непрерывно следит за текущей высотой. При включении режима стабилизации высоты на пульте управления ПУ-46 корректор «запоминает» значение высоты и выдает сигнал ΔΗ – отклонение от этой высоты в канал тангажа САУ-154-2.
Канал ΔM. Сигнал ΔM формируется в блоке коррекции числа М БКМЭ-Ι (рис. 1). Блок непрерывно следит за изменением сигнала текущего значения числа М от вычислителя ВСМВ-Ι-15М. При включении режима стабилизации числа М на ПУ-46 блок «запоминает» значение числа М и выдает сигнал ΔM как отклонение от этого значения.
Дата добавления: 2015-07-10; просмотров: 261 | Нарушение авторских прав