Читайте также:
|
После обеспечения точности системы, структурная схема собранная в Simulink представлена на рисунке 5.
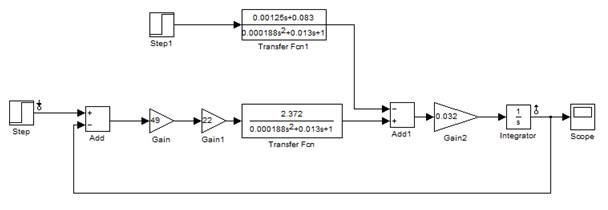
Рисунок 5. Структурная схема системы собранная в Simulink
Переходная характеристика данной САУ представлена на рисунке 6.

Рисунок 6. Переходная характеристика САУ
По данной характеристике видно что система не устойчива. Для устойчивости рассчитаем регулятор с помощью пакета Matlab и программы rreg.m.
Получаем в пакете Matlab:
Передаточная функция регулятора в цепи ОС:
Transfer function:
26.53 s^2 + 3531 s + 2.301e005
------------------------------
s^2 + 479.7 s + 2.301e005
Передаточная функция регулятора в цепи ОС для микроконтроллера:
Transfer function:
17.41 z^2 - 30.03 z + 13.2
---------------------------
z^3 - 0.8571 z^2 + 0.4286 z
Sampling time: 0.0020846
В структурную схему на рисунке 5 вставляем блок Discrete
Transfer Fcn и вводим полученные параметры.

Рисунок 7. Структурная схема САУ с регулятором
Переходная характеристика данной схемы представлена на рисунке 8.

Рисунок 8. Переходная характеристика САУ с регулятором.
Из рисунка видно, что система устойчива, время переходного процесса  .
.
5. Анализ характеристики системы(!!!!!!!!!!!!!АХС получилось херня. Исправленная версия в файле «на печать»!!!!!!!!!!!!!!!!!))
По варианту нужно промоделировать ошибку в режиме позиционирования в зависимости от омического сопротивления ротора исполнительного двигателя.
При Rя=0.14

Рисунок 11. Анализ характеристики системы
При Rя= 5 0м:

Рисунок 12. Анализ характеристики системы
При Rя=20 Ом:

Рисунок 13. Анализ характеристики системы
По графикам видно что ошибка по позиционированию не превышает 6 угл.мин.
Дата добавления: 2015-10-13; просмотров: 70 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Синтез параметров автоматической системы | | | Шаблон циклической программы для микроконтроллера |