Читайте также:
|
Типовой расчет
“ Расчет системы углового перемещения”
Выполнил Проверил
студент гр. 922403 Шмарловский А.С.
Кебец А.М.
Минск 2012
Задание
Вариант: 3-1-9
Параметры при угловом перемещении:
Момент инерции нагрузки: 
Статический момент сопротивления: 
Угловая скорость движения: 
Угловое ускорение движения: 
Требования к качеству регулирования:
Максимальная ошибка в режиме движения: 
Максимальная ошибка в режиме позиционирования: 
Перерегулирование в переходном процессе: 
Время переходного процесса: 
Тип датчика: энкодер.
Анализируемая характеристика системы: Ошибка в режиме позиционирования.
Изменяющийся параметр: Омическое сопротивление ротора исполнительного двигателя.
Закон перемещения объекта не известен.
Функциональная схема
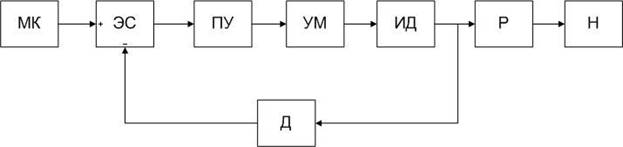
Рисунок 1. Функциональная схема.
Блоки:
МК – микроконтроллер
ЭС – элемент сравнения
ПУ – предусилитель мощности
УМ – усилитель мощности
ИД – исполнительный двигатель
Р – редуктор
Д – датчик углового перемещения, энкодер
Н – нагрузка
Дата добавления: 2015-10-13; просмотров: 74 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Манера общения | | | Расчет и выбор основных функциональных элементов |