Читайте также:
|
Система цифровой коррекции моделируется в компьютерном приложении MATLAB Simulink.
На вход системы подается идеальный единичный скачок (тупенька).
В Simulink это осуществляется добавлением на рабочее поле программы элемента Step с параметрами Step time = 1, Initial value = 0, Sample time = 0.1.
Ступенька подается на блок wn, указанный в задании на курсовую работу. Блок содержит помеху, которую необходимо отфильтровать для получения на выходе системы ступеньки.
Выход блока wn соединяется с моделью осцилографа Scope через звено дискретизации (элемент Zero-Order Hold с параметрами Scope time = 0.5).
Полученная первоначальная модель формирования сигналов изображена на рисунке 1. Сигнал на выходе блока изображен на рисунке 2.
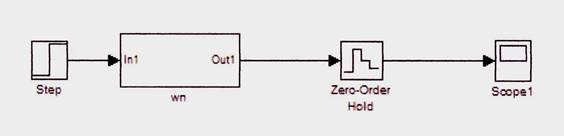
Рис 1. Модель формирования сигналов
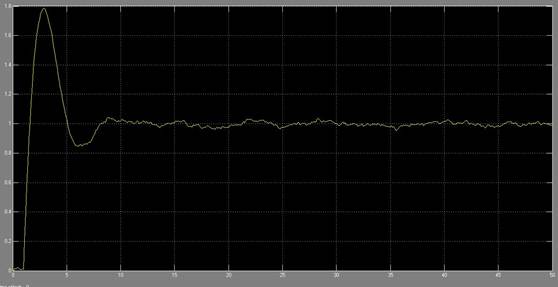
Рис 2. Сигнал на выходе блока wn
Как видно из рисунка, сигнал на выходе блока wn сильно отличается от идеальной ступеньки, поданной на вход. Поэтому для фильтрации сигнала необходимо поместить на рабочее поле программы блок дифференциатора Discrete Derivative с параметрами, заданными в Simulink по умолчанию, и блок цифрового фильтра Discrete Filter с параметрами Denominator = [1], Sample time = 0.5. На выходе каждого из блоков необходимо поставить модель осцилографа Scope 2 и Scope 3 соответственно для контроля сигнала после каждого блока.
Полученная модель системы цифровой коррекции приведена на рисунке 3.
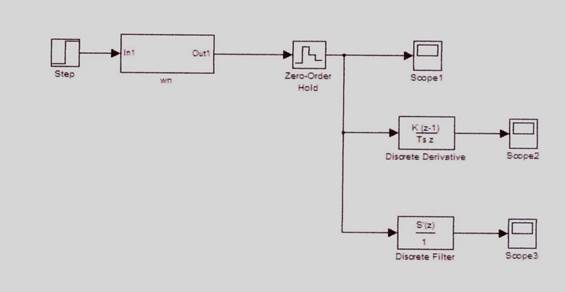
Рис 3. Модель системы цифровой коррекции сигналов
Дата добавления: 2015-08-21; просмотров: 49 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Введение | | | Методика проведения фильтрации сигналов |