Читайте также:
|
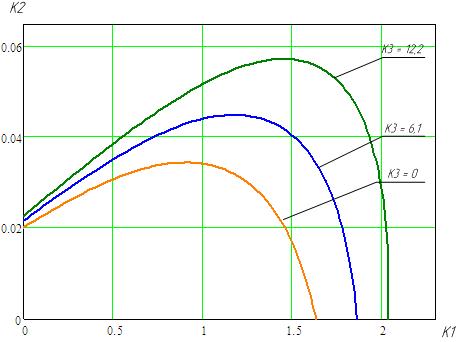
Рис. 7. Области заданного запаса устойчивости при Tкw = 0,0605 и различных значениях настроечного параметра k3

Рис. 8. Области заданного запаса устойчивости при Tкw = 0,218 и различных значениях настроечного параметра k3

Рис. 9. Области заданного запаса устойчивости при Tкw = 0,375 и различных значениях настроечного параметра k3

Рис. 10. Области заданного запаса устойчивости при k3=const и различных значениях времени такта квантования
Расчет переходных процессов в цифровых АСР.
Для синтеза АСР с заданными показателями качества работы необходимо построить переходные процессы для найденных параметров настройки регулятора и принять в качестве оптимальных те, при которых выполняются требования к качеству функционирования ЦАСР.
Объект по каналу регулирования имеет передаточную функцию:
 .
.
По каналу возмущения передаточная функция объекта имеет вид:
 .
.
ПИД‑регулятор в соответствии с его передаточной функцией представлен в виде трёх параллельно соединенных операторов.
 Рис. 11. Структурная схема моделирования системы с цифровым ПИД-регулятором
Рис. 11. Структурная схема моделирования системы с цифровым ПИД-регулятором
Результаты расчета переходных процессов при действии на систему ступенчатых управляющего (U=1) и возмущающих (FW=20% хода Р.О.) воздействий приведены на рис. 12-19 и в таблице 3.
Графики переходных процессов в АСР температуры, приведенные ниже, наглядно иллюстрируют влияние на качество регулирования величины такта квантования Tкw и дифференцируающей составляющей k3 в законе регулирования регулятора.
Рис. 12.Переходные процессы при времени квантования Tкw = 0,0605 мин, разных k3 и изменении задания регулятору (U=1°C)

Рис. 13.Переходные процессы при времени такта квантования Tкw = 0,0605 мин, разных k3 и изменении внешнего воздействия (FW=20%)

Рис. 14.Переходные процессы при времени квантования Tкw = 0,218 мин, разных k3 и изменении задания регулятору (U=1°C)

Рис. 15.Переходные процессы при времени такта квантования Tкw = 0,218 мин, разных k3 и изменении внешнего воздействия (FW=20%)

Рис. 16.Переходные процессы при времени квантования Tкw = 0,375 мин, разных k3 и изменении задания регулятору (U=1°C)

Рис. 17.Переходные процессы при времени такта квантования Tкw = 0,375 мин, разных k3 и изменении внешнего воздействия (FW=20%)

Рис. 18. Переходные процессы в АСР температуры при k3 = 0 и различных значениях времени такта квантования Tкв по каналу управления (U=1)

Рис. 19. Переходные процессы в АСР температуры при k3 = 0 и различных значениях времени такта квантования Tкв по каналу возмущения (FW=20%)
Результаты анализа переходных процессов в системе регулирования температуры сведем в таблицу 3:
Табл. 3. Сводные данные по расчёту
| Настройки регулятора | Воздействия | ||||||||
| Tкw | K1 | K2 | K3 | U = 1 | FW = 20 | ||||
| Δθmах | ψ | Тр | Δθmах | ψ | Тр | ||||
| 0,0605 | 0,919 | 0,034 | 0,47 | 0,77 | 26,5 | 0,25 | 0,8 | 27,8 | |
| 1,17 | 0,045 | 6,1 | 0,49 | 0,78 | 24,4 | 0,22 | 0,79 | 25,8 | |
| 1,453 | 0,057 | 12,2 | 0,52 | 0,77 | 22,3 | 0,21 | 0,78 | 23,7 | |
| 0,218 | 0,841 | 0,118 | 0,43 | 0,79 | 22,7 | 0,25 | 0,83 | 24,2 | |
| 1,054 | 0,15 | 1,5 | 0,45 | 0,8 | 20,8 | 0,23 | 0,83 | 22,3 | |
| 1,263 | 0,186 | 0,48 | 0,81 | 19,2 | 0,21 | 0,82 | 20,7 | ||
| 0,375 | 0,767 | 0,194 | 0,4 | 0,83 | 22,7 | 0,25 | 0,86 | 24,1 | |
| 0,923 | 0,238 | 0,75 | 0,42 | 0,83 | 0,23 | 0,86 | 22,4 | ||
| 1,072 | 0,289 | 1,5 | 0,44 | 0,86 | 19,6 | 0,22 | 0,86 | 20,8 |
Из анализа результатов, приведенных в таблице 3, можно сделать следующие выводы:
1. Увеличение времени такта квантования Tкw в данной АСР в пределах рассчитанного диапазона Т=0,01Т95¸0,1Т0=(0,0605¸0,375) мин приводит к улучшению качественных показателей процесса регулирования. Динамическая ошибка Δθ mах и время регулирования Тр уменьшаются, а степень затухания переходного процесса ψ, в свою очередь, увеличивается.
Однако увеличение Tкw эквивалентно увеличению транспортного запаздывания в системе, отрицательно влияющего на устойчивость и качество работы АСР. Поэтому дальнейшее увеличение времени Tкw приведет к ухудшению показателей качества процесса регулирования.
2. Введение дифференцирующей составляющей в закон регулирования регулятора (настройка К3) наиболее эффективно при небольших значениях времени такта квантования. Увеличение времени Tкw снижает влияние параметра К3 на динамическую точность и быстродействие работы АСР.
3. За оптимальные настроечные параметры регулятора принимаем те, которые обеспечивают заданное качество регулирования при возможно большем значении времени такта квантования Tкw т.е. при наименьших затратах на управление. Следовательно, в качестве оптимальных выбираем следующие значения настроенных параметров:
K1 = 1,072; К2 = 0,289; К3 = 1,5; Tkw=0,375 мин.
При этом динамическая:
- по каналу управления: Δθ mах = 0,44 °С;
- по каналу возмущения: Δθ mах = 0,22 °С.
Время регулирования:
- по каналу управления: Тр = 19,6 мин;
- по каналу возмущения: Тр = 20,8 мин.
Степень затухания переходных процессов:
- по каналу управления:

- по каналу возмущения:
 .
.
Остаточное отклонение регулируемого параметра, т.е. величина статической ошибки Δθст = 0. Это объясняется тем, что статическая ошибка регулирования при использовании ПИД - регулятора равна нулю.
Список использованной литературы.
1) Беспалов, А.В. Системы управления химико-технологическими процессами: учебник для вузов / А.В. Беспалов, Н.И. Харитонов. – М.: ИКЦ “Академкнига”, 2007. – 690 с.: ил.
2) Ерофеев, А.А. Теория автоматического управления: учебник для вузов / А.А. Ерофеев. – 2-е изд., перераб. и доп. – СПб.: Политехника, 2001. – 302 с., ил.
3) Куликов, Ю.А. Методические указания к выполнению курсовой работы по теории автоматического управления / Ю.А. Куликов, И.Н. Терюшов. – Казань: КХТИ, 1984.
Дата добавления: 2015-10-31; просмотров: 94 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Последовательность расчета оптимальных настроек цифровых регуляторов. | | | Selection of task for the course work |