Читайте также:
|
1. Схема замкнутой САР приведена на рис. 2. Для выполнения п. 1 «Программы работы» использовать анализатор спектра. Затем произвести кусочно-линейную аппроксимацию полученной ЛАЧХ, выделив участки с наклонами –20 дб/дек, -40 дб/дек, -60 дб/дек и т.д.
2. Для выполнения п. 3 «Программы работы» необходимо вычесть из желаемой ЛАЧХ ЛАЧХ нескорректированной САР [1].
3. Для выполнения п. 5 «Программы работы» следует использовать рекомендации, изложенные в [1]. Максимальное значение сопротивления резисторов не должно превышать 50 кОм. Значения сопротивлений резисторов Rc должно быть равным значению ½Z1½ (рис. 2).
Параметры Functional Generator: прямоугольные импульсы; frequency: 1 Hz; duty cycle: 50; amplitude: 1V; offset: 0.
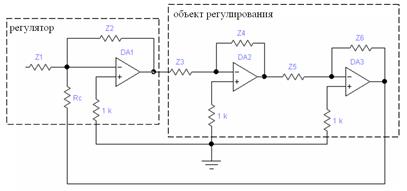
Рисунок 2. Пример замкнутой системы автоматического
регулирования
Содержание отчета
1. Электрическая принципиальная схема замкнутой САР.
2. ПФ нескорректированной САР, определенная по виду ЛАЧХ.
3. Графики ЛАЧХ: нескорректированной САР, желаемой, корректирующего устройства. График ЛФЧХ скорректированной САР.
4. Определение структуры и расчет параметров корректирующего устройства.
5. Графики переходных процессов Uвх(t) и Uвых(t) скорректированной САР.
6. Значения запаса устойчивости по модулю и по фазе.
7. Вывод о полученных результатах.

Рисунок 1. Принципиальные схемы объектов регулирования
Таблица 1
Исходные данные
| № варианта | Схема объекта регулирования | Значения параметров объекта |
| А | R1=10 kOm; C1=1 мкФ; C2=10 мкФ; R2=20 kOm; C3=10 мкФ; C4=2 мкФ | |
| Б | R1=10 kOm; C1=10 мкФ; R2=10 kOm; C2=2 мкФ; C3=10 мкФ | |
| В | R1=10 kOm; C1=10 мкФ; R2=10 kOm; C2=1 мкФ; C3=2 мкФ; R3=10 kOm; C4=1 мкФ; R4=1 kOm; C5=10 мкФ | |
| Г | R1=10 kOm; C1=5 мкФ; C2=10 мкФ | |
| Д | R1=20 kOm; C1=2 мкФ; R2=10 kOm; C2=1 мкФ; R3=5 kOm; C3=20 мкФ | |
| Е | R1=10 kOm; C1=10 мкФ; C2=1 мкФ; R2=1 kOm; C3=2 мкФ; C4=10 мкФ; R3=20 kOm; C5=1 мкФ; C6=10 мкФ | |
| Ж | R1=10 kOm; C1=10 мкФ; R2=10 kOm; C2=20 мкФ; R3=20 kOm; C3=3 мкФ; R4=10 kOm; C4=30 мкФ |
Контрольные вопросы
1. Что называется устойчивостью?
2. Какими свойствами обладает САР, настроенная на модульный оптимум?
3. В каких случаях целесообразно использовать интегрирующее, дифференцирующее и интегро-дифференцирующее корректирующие устройства соответственно?
4. Какими недостатками обладает ПИД-регулятор?
Каким образом можно повысить быстродействие и точность САР, не уменьшая запас ее устойчивости?
Практическая работа № 4
Влияние закона регулирования
Дата добавления: 2015-10-29; просмотров: 118 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Методические указания | | | Методические указания |