Читайте также:
|
История

Космический аппарат в собранном виде.
В апреле 2004 года НАСА начало отбор предложений по оснащению нового марсохода научным оборудованием, и 14 декабря 2004 года было принято решение об отборе восьми предложений. В конце того же года началась разработка и испытания составных частей системы, включая разработку однокомпонентного двигателя производства компании Aerojet, который способен выдавать тягу в диапазоне от 15 до 100 % максимальной при постоянном давлении наддува.
Создание всех компонентов марсохода было завершено к ноябрю 2008 года, причём большая часть инструментов и программного обеспечения MSL продолжало испытываться. Перерасход бюджета миссии составил около 400 миллионов долларов. В следующем месяце НАСА отложило запуск MSL на конец 2011 года из-за недостатка времени для испытаний.
С 23 по 29 марта 2009 года на сайте НАСА проводилось голосование по выбору названия для марсохода, на выбор было дано 9 слов. 27 мая 2009 года, победителем было объявлено слово «Кьюриосити». Оно было представлено шестиклассницей из Канзаса Кларой Ма.
Марсоход был запущен ракетой Атлас V с мыса Канаверал 26 ноября 2011 года. 11 января 2012 года был проведён специальный манёвр, который эксперты называют «самым важным» для марсохода. В результате совершённого манёвра аппарат взял курс, который привёл его в оптимальную точку для десантирования на поверхность Марса.
28 июля 2012 года была проведена четвёртая небольшая коррекция траектории, двигатели включили всего на шесть секунд. Операция прошла настолько успешно, что последняя коррекция, намеченная на 3 августа, уже не понадобилась.
Посадка произошла успешно 6 августа 2012 года, в 05:17 UTC. Радиосигнал с подтверждением посадки достиг Земли в 05:32 UTC, и стало известно об успешной посадке марсохода на поверхность Марса.
Задачи и цели миссии

29 июня 2010 года инженеры из Лаборатории Реактивного Движения собрали «Кьюриосити» в большом чистом помещении, в рамках подготовки к запуску марсохода в конце 2011 года.
MSL имеет четыре основных цели:
§ установить, существовала ли когда-либо жизнь на Марсе;
§ получить подробные сведения о климате Марса;
§ получить подробные сведения о геологии Марса;
§ провести подготовку к высадке человека на Марсе.
Для достижения этих целей перед MSL поставлено шесть основных задач:
§ определить минералогический состав марсианских почв и припочвенных геологических материалов;
§ попытаться обнаружить следы возможного протекания биологических процессов — по элементам, являющимся основой жизни, какой она известна землянам: (углерод, водород, азот, кислород, фосфор, серу);
§ установить процессы, в которых формировались марсианские камни и почвы;
§ оценить процесс эволюции марсианской атмосферы в долгосрочном периоде;
§ определить текущее состояние, распределение и круговорот воды и углекислого газа;
§ установить спектр радиоактивного излучения поверхности Марса.
Также в рамках исследований измерялось воздействие космической радиации на компоненты АМС во время перелёта к Марсу. Эти данные помогут оценить уровни радиации, ожидающие людей в пилотируемой экспедиции на Марс.
Состав
| Перелётный модуль | 
| Модуль управляет траекторией Mars Science Laboratory во время полёта с Земли на Марс. Также включает в себя компоненты для поддержки связи во время полёта и регулирования температуры. Перед входом в атмосферу Марса модуль отделился от капсулы. |
| Капсула | Капсула необходима для спуска через атмосферу. Она защищает марсоход от влияния космического пространства и перегрузок во время входа в атмосферу Марса. В верхней части находится контейнер для парашюта, который замедлит скорость спуска капсулы. Рядом с контейнером парашюта установлено несколько антенн связи. | |
| Небесный кран | 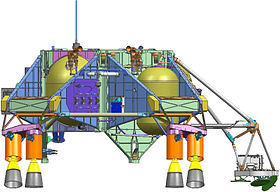
| После того, как теплозащитный экран и капсула выполнят свою задачу, они расстыковываются, тем самым освобождая путь для спуска аппарата. После расстыковки кран обеспечивает точный и плавный спуск марсохода на поверхность Марса, который достигается за счёт использования реактивных двигателей и контролируется с помощью радиолокатора на марсоходе. |
| Марсоход «Кьюриосити» | 
| Марсоход под названием «Кьюриосити» является основной частью миссии, содержит все научные приборы, а также важные системы связи и энергоснабжения. Во время полёта шасси складывается для экономии места. |
| Теплозащитный экран | 
| Теплозащитный экран защищает марсоход от крайне высокой температуры, воздействующей на спускаемый аппарат при торможении в атмосфере Марса. |
| Спускаемый аппарат | 
| Масса спускаемого аппарата (изображён в составе с перелётным модулем) составляет 3,4 тонны. Спускаемый аппарат служит для контролируемого безопасного снижения марсохода при торможении в марсианской атмосфере. |
Марсоход
Масса «Кьюриосити» после мягкой посадки составила 899 кг, в том числе 80 кг научного оборудования.
Размеры: Марсоход имеет длину 3 м, высоту с установленной мачтой 2,1 м и ширину 2,7 м. «Кьюриосити» гораздо больше своих предшественников — марсоходов Спирит и Оппортьюнити — длиной 1,5 м и массой 174 кг, в том числе 6,8 кг научной аппаратуры.
Передвижение: На поверхности Марса MSL способен преодолевать препятствия до 75 сантиметров в высоту. Максимальная скорость на твёрдой ровной поверхности составляет 144 метра в час. Максимальная предполагаемая скорость на пересечённой местности составляет 90 метров в час при автоматической навигации. Средняя же скорость, предположительно, составит 30 метров в час. Ожидается, что за время двухлетней миссии MSL пройдёт не менее 19 километров.
Источник питания: «Кьюриосити» питается от Радиоизотопного Термоэлектрического Генератора (РИТЭГ), им успешно пользовались спускаемые аппараты Викинг-1 и Викинг-2 в 1976 году.
Система отвода тепла: (HRS) Температура области, в которой будет находиться «Кьюриосити», в мае может колебаться от +30 до −127 ° С. Таким образом, система отвода тепла (HRS), прокачивает жидкость через трубы общей длинной в 60 м в теле MSL, чтобы чувствительные элементы системы находились в оптимальной температуре. Другие методы нагрева внутренних компонентов включают в себя использование тепла, которое был выделено от приборов, а также лишнего тепла от генератора MMRTG. HRS также имеет способность охлаждать свои компоненты, если это необходимо. На космическом аппарате установлен криогенный теплообменник. Он позволяет сохранять температуру различных отсеков аппарата на отметке в — 173 градуса Цельсия.
Компьютер: На марсоходе установлено два одинаковых бортовых компьютера под названием «Rover Compute Element» (RCE) под управлением процессора RAD750 с частотой 200 МГц; они содержат радиационностойкую память. Каждый компьютер включает в себя 256 КБ EEPROM, 256 МБ DRAM, и 2 ГБ флэш-памяти. Это количество, в целом, больше 3 МБ EEPROM, 128 Мб DRAM, и 256 Мб флэш-памяти, которые имелись на марсоходах Спирит и Оппортьюнити. Компьютер постоянно следит за марсоходом: например, сам может повысить или понизить температуру в те моменты, когда это необходимо. Он даёт команды на фотографирование, вождение марсохода, отправку отчёта о техническом состоянии инструментов. Приказы марсоходу передаются операторами с Земли.
Связь: «Кьюриосити» имеет две системы связи. В первую входят передатчик и приёмник X-диапазона, с помощью которых марсоход связывается напрямую с Землёй, со скоростью до 32 кбит/сек. Вторая работает в диапазоне ДМВ (UHF) и создана на базе программно-определяемой радиосистемы Electra-Lite, разработанной в JPL специально для космических аппаратов. ДМВ-радио используется для связи с искусственными спутниками Марса. Несмотря на то, что у «Кьюриосити» имеется возможность прямой связи с Землёй, большая часть данных будет ретранслироваться орбитальными аппаратами, обеспечивающими бóльшую пропускную способность за счёт большего диаметра антенн и более мощных передатчиков. Скорости передачи данных между «Кьюриосити» и каждым орбитальным аппаратом могут быть 2 Мбит/с (Марсианский разведывательный спутник) и 256 кбит/сек (Марс Одиссей), каждый спутник имеет возможность держать связь с «Кьюриосити» приблизительно 8 минут в день.
Мобильность марсохода: Как и в предыдущих марсоходах — Mars Exploration Rovers и Mars Pathfinder «Кьюриосити» имеет платформу с научным оборудованием, всё это установлено на шести колёсах, каждое из которых имеет свой электродвигатель, причём два передних и два задних колеса будут участвовать в рулении, что позволит аппарату разворачиваться на 360 градусов, оставаясь при этом на месте. Колёса «Кьюриосити» значительно больше, чем те, которые использовались в предыдущих миссиях. Каждое колесо имеет определённую конструкцию, которая будет помогать марсоходу поддерживать тягу, если он застрянет в песке, также колёса марсохода будут оставлять след в виде регулярного отпечатка на песчаной поверхности Марса. В этом отпечатке при помощи кода Морзе в виде отверстий записаны буквы JPL (Лаборатория реактивного движения, англ. Jet Propulsion Laboratory). При помощи бортовых камер марсоход распознает элементы регулярного отпечатка колёс (узоры) и сможет определить пройденное расстояние.
Дата добавления: 2015-10-26; просмотров: 113 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| HIGHER SPIRITUALISM | | | ПЕНСИОННОЕ ОБЕСПЕЧЕНИЕ ПРИ УВОЛЬНЕНИИ С ВОЕННОЙ СЛУЖБЫ (СЛУЖБЫ) ВОЕННОСЛУЖАЩИХ И СОТРУДНИКОВ МЧС РОССИИ |