Читайте также:
|
Централизованные сортирующие системы производят сортировку лесоматериалов по любым признакам. Принцип работы этих систем основан на масштабном слежении за движущимся сортиментом. Это слежение может производиться самыми различными способами, например при помощи механической следящей системы, счета количества импульсов, различных цифровых сравнивающих устройств и преобразователей. Поэтому эти устройства представляют собой физическую модель сортировочного транспортера и размещенного на нем сортимента. Роль транспортера выполняют различные подвижные конструкции, например лентопротяжный механизм или различные регистры сдвига, производящие слежение «шагами».
Блок-схема ССС показана на рис. 15.6, а. Оператор на пульте управления ПУ задает адрес места сброски сортимента. При своем движении сортимент воздействует на сигнальный флажок Ф, при этом в блоке памяти синхронно-следящей системы ССС производится запись информации. Эта информация начинает копировать движение сортимента в масштабе. В момент подхода сортимента к месту сброски на выходе ССС появляется сигнал на сброску, в результате чего срабатывает сбрасыватель Сбi. Синхронная связь между скоростью движения сортимента и информацией в ССС производится через синхронизирующую систему СС. Основным элементом данной системы является ССС и СС.
Синхронно-следящие системы различают по виду носителя информации. Основными записями информации являются: запись на бумажной, магнитной и киноленте, запись информации на базе средств вычислительной техники (различные регистры сдига и счетчика числа импульсов).
В качестве средств носителя информации сортируемых объектов применяют перфорацию, магнитную и электромеханическую запись и другие способы.
Следящие системы с записью на бумажную ленту. Принципиальная конструкция синхронно-следящей системы представляет собой лентопротяжное устройство, которое является моделью сортировочного лесотранспортера. Масштаб копирования составляет 300... 400. Это означает, что путь, проходимый бу-

Рис. 15.6. Синхронно-следящая система на бумажной ленте
мажной лентой, l в 300 или 400 раз меньше, чем путь, проходимый за то же время сортировочным транспортером, т. е.
l = L /400,
L — расстояние до штабеля.
Запись информации на бумажной ленте производится путем пробивания в ней отверстий (рис. 15.6, б, в, г, д) специальным устройством перфоратором, сигнал на срабатывание которому подается в момент прохождения сортимента у сигнального
флажка. Отверстия, перемещаясь с лентой, подходят к считывающим щеткам СЭ, которые установлены на различном расстоянии от перфоратора, что соответствует расстоянию штабелей от точки начала отсчета Ф.
Главным вопросом такой следящей системы является выбор системы кодирования, так как это оказывает большое влияние на структуру всей ССС.
Для записи и считывания команд в ССЗУ могут быть использованы как системы параллельных кодов, так и системы последовательных кодов. При этом под параллельными кодами будем подразумевать такую систему записи и считывания, при которой к считывающим элементам во всех каналах подходят одновременно. Соответственно под последовательными кодами будем подразумевать такую систему записи и считывания, при которой записанные сигналы подходят к считывающим элементам последовательно.
Помимо этих двух принципиально различных методов кодирования команд, возможны и комбинированные способы, например при применении так называемого двоичного временного кода и других, в которых коды адресов отличаются друг от друга не только наличием или отсутствием тех или иных меток, но и последовательностью их расположения в направлении движения носителя информации.
Если воспользоваться в качестве примеров записей команды различными кодами системы ССЗУ с бумажной лентой, то, изображая круглыми метками запись информации, а квадратами считывающие элементы, параллельный способ записи команд получим в виде, представленном на рис. 15.6, б, последовательный— на рис. 15.6, в и последовательно-параллельный — на рис. 15.6, г.
Рассмотрим методы записи команд параллельным кодом. Простейшим методом будет использование одного канала (разряда) для записи команд на сброс сортимента в данном адресе. В этом случае количество каналов (разрядов) будет равно количеству адресов места сброски, т. е.
n = N.
Для считывания команды в каждом канале в этом случае потребуется по одному считывающему элементу, т. е.
k = N.
где k — количество считывающих элементов.
Такое простейшее кодирование было применено, в частности, в шариковых барабанах заказа, где число дисков соответствовало количеству мест сброски сортиментов с транспортера.
При двухканальной записи каждая команда записывается двумя метками, по одной в разных каналах. В этом случае
количество команд N и число каналов η связаны между собой соотношением

где Сп2 — число сочетаний из n элементов по 2.
Так как для считывания каждой команды потребуется по два считывающих элемента, то
k =2N.
При трехканальной записи команд соответственно
и
k = 3N.
При записи команд двоичным кодом, т. е. если каждую команду (адрес) записывать некоторым двоичным числом (исключая 0), то
N = 2n — 1
или
n≥ log2 (N + 1),
где n — целое число.
Количество считывающих элементов, необходимых для расшифровки команд, зависит от соответствия последовательности кодов и адресов. Наименьшее число считывающих элементов потребуется, если последовательность двоичных чисел кодов будет обратной последовательности адресов, т. е. когда 1-му адресу соответствует наибольшее двоичное число, а последнему, N- му, адресу— 1.
Рассмотрим теперь вопросы оптимального кодирования команд при последовательных кодах. Как показано на рис. 15.6, в при последовательном коде необходим один канал. Однако при непрерывном движении носителя информации из-за невозможности фиксировать моменты времени, когда к элементу подходят разряды, в которых записаны 0 (отсутствие меток), необходимо иметь маркерные метки, записанные во всех последовательных разрядах, плюс одну метку, по которой с дешифратора выдается считанная команда. Таким образом, независимо от числа адресов при последовательном коде записи команд потребуется всего два канала, т. е.
n = 2.
Число маркерных меток
т = п п + 1,
где п п— число последовательных разрядов, определяемых при двоичном (наиболее рациональном) коде из соотношения п≥ ≥log2(N +l). Количество считывающих элементов соответственно будет k = 2N.
Рассмотрим теперь систему последовательно-параллельного метода кодирования команд. Идея этого метода заключается в том, что отдельные команды различаются не только наличием или отсутствием меток в том или ином разряде, но и последовательностью их расположения. В соответствии с этим дешифрирующие устройства должны различать команды, отличающиеся друг от друга только последовательностью подхода меток к считывающим элементам. При этом так же, как и при параллельном коде, возможны двухканально-временной, трех-канально-временной или двоично-временной коды.
При двухканально-временном коде количество записываемых команд связано с числом каналов соотношением

где Сп2 — число сочетаний из n элементов по 2; Р 2 — число перестановок из двух элементов. Соответственно
k = 2N.
При трехканально-временном коде

и
k = 3N и т. д.
Если применить двоично-временной код, в котором считывающим блоком различаются как последовательность поступления меток, так и их наличие во всех n разрядах, то количество команд, которое может быть записано при n -разрядном (n -канальном) двоично-временном коде, определится из выражения

Число считывающих элементов аналогично числу элементов при двоичном кодировании, т. е. определяется из выражения k =1·20 + 2·21 + 3·22 +... + n 2n-1. Одним из методов кодирования команд в ССС непрерывного действия является способ, изображенный на рис. 15.6, д. Идея этого способа заключается в том, что каждая команда записывается двумя метками на одном и том же канале, но расстояние между двумя метками λ3 для каждого адреса различно. Считывание команд произво-
дится двумя элементами, расположенными друг от друга на расстоянии λc. Команда на сброс сортимента с транспортера происходит тогда, когда сработают оба считывающих элемента, т. е. при условии λз = λc.
При этой системе кодирования число каналов n при любом N равно единице, и для считывания каждого адреса необходимо по два считывающих элемента, т. е.
n =l; k = 2 N.
Однако, как это видно из рис. 15.6, д, при этой системе значительно уменьшается плотность записи информации. Действительно, во избежание ложных считываний расстояние между
двумя записанными кодами l должно быть больше λз. max или
λс. max на величину Δ', определяемую разрешающей способностью считывающих элементов. При N адресах
λз. max — λс. max — Δ N
и соответственно
l≥ Δ Ν + Δ = Δ (Ν + 1 )
общая длина участка носителя информации L 3, занимаемая одним адресом и слагаемая из расстояния между кодами команд и l протяженностью, занимаемой самим кодом λз. max, будет
L3 = l+ λз. max = Δ ( 2 N + 1 ).
Кроме основной инфромации, которая требуется для сортировки бревен, на ленте может быть записана также информация об объеме сортимента, о породе и т. д. В дальнейшем эту ленту можно использовать как документ о проделанном объеме работ. Запись и хранение информации о движении сортимента можно производить и на киноленте. Конструкция командоаппа-ратов в этом случае аналогична вышеописанной. В качестве считывающих элементов в некоторых случаях применяются фотоэлектрические датчики. Недостатком таких ССС является невозможность повторного использования бумажной ленты и киноленты. Этот недостаток можно устранить, применяя запись информации на магнитных лентах и барабанах. Известно, что магнитную запись можно стирать, вследствие чего ленту можно неоднократно использовать. Однако применение этой системы требует более сложной установки.
Импульсные синхронно-следящие системы. Принцип действия этих систем основан на применении счетных схем, считывающих число импульсов, которое соответствует пути перемещения сортимента. Поэтому эти системы представляют собой математическую модель сортировочного транспортера. На рис. 15.7
приведена блок-схема такой системы. Работа этого сортировочного устройства происходит следующим образом: оператор нажатием кнопки пульта управления ПУ производит предварительный заказ сбрасывания сортимента в определенный штабель. Сортимент, двигаясь, включает флажок Φ (начало отсчета) и в счетную схему ИСС от генератора импульсов ГИ начинают поступать импульсы. Счетная система представляет собой обычный регистр сигнала, в котором информация о перемещающемся сортименте хранится в виде перемещающейся 1 в ячейках блока память. Количество ячеек памяти в одной
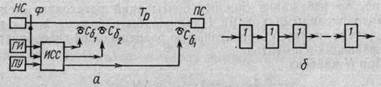
Рис. 15.7. Блок-схема импульсной сортировочной системы

Рис. 15.8. Счетная кольцевая схема
дорожке определяется шагом слежения, под которым подразумевается длина пути перемещения сортимента, приходящаяся на один импульс. Обычно шаг слежения составляет 2... 5 см. Очевидно, что чем меньше шаг слежения, тем точнее работа системы, а количество ячеек памяти будет большим. Действительно, при шаге слежения 2 см и длине фронта сортировки 240 м их количество составит (24 000:2=12 000).
Это количество ячеек только для одного, последнего штабеля (каждая дорожка из ячеек памяти соответствует одному
штабелю). Для других штабелей количество ячеек будет меньшим, но в общей сумме это число будет очень внушительным. Для устранения этого применяют специальные кольцевые схемы (рис. 15.8).
Принцип работы кольцевых счетных схем основан на следующем. Пусть мы имеем два регистра сдвига, первый из которых содержит n 1, а второй n 2 элементов. Соединим выход каждого регистра сдвига с его входом. Тогда, если на вход первого регистра сдвига подать сигнал, то через n 1 тактовых импульсов он будет вновь с выхода регистра сдвига подан на его вход. Соответственно на выходе второго регистра сдвига сигнал на его вход будет подан через n 2 тактовых импульса.
Если выходы первого и второго регистров сдвигов подать на вход схемы совпадения И, то, очевидно, элемент И сработает только тогда, когда будет сигнал на выходе первого и второго регистров сдвига. Прекращение циркуляции импульсов в кольцевой схеме произойдет тогда, когда после выхода сигнала на сброску поступит сигнал в схему «запрета». Если взять числа элементов n 1 и n 2 первого и второго регистров сдвига, не имеющих общего делителя, то совпадение сигналов на их выходе произойдет только после числа импульсов Ν, равного
N = п 1 п 2.
Соответственно при i регистрах сдвига N = п 1 п 2 ... ni.
Так как число элементов в кольцевых счетных схемах определяется суммой элементов всех регистров, т. е. k = Σni, минимальное значение k будет получено при условии п 1 ≈п 2 ≈п 3...
Предположим, что нам надо сосчитать 100 импульсов. Тогда при однорядовом регистре сдвига потребуется 100 счетных ячеек памяти, а для двухкольцевой схемы будем иметь √N=√100 = 10.
Принимаем n 1 = 10 и n 2=11 тогда количество считываемых импульсов составит
N = п 1 п 2= 10∙11 = 110,
а количество ячеек будет
k =10+11=21.
Таким образом, вместо 100 счетных ячеек памяти в двухкольцевой схеме потребуется только 21 ячейка.
Еще большего сокращения счетных элементов можно достигнуть при применении дополнительных датчиков, установленных у мест сброски. В этом случае команда на сброску подается датчиком. В этом случае шаг слежения составит
Δ≤ l min + Δ l,
где l min — минимальная длина сортируемых бревен; Δ l — минимальный межторцовой разрыв между бревнами.
Счетные схемы обычно собирают на базе типовых ячеек типа И-114, который представляет собой простой четырехразрядный суммирующий счетчик с параллельным переносом.
Возможно и другое решение вопроса по автоматизации сортировки, например, при помощи электронно-вычислительных машин (ЭВМ). В счетно-управляющем устройстве ЭВМ записываются закодированные двоичные числа, которые изображают расстояние до соответствующих мест сброски сортиментов, т. е.
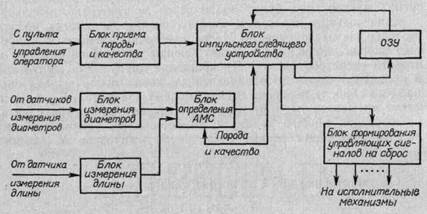
Рис. 15.9. Блок-схема работы ЭВМ на сортировке
транспортер представляет собой цифровую ось. При поступлении сигнала на начало слежения от флажка Φ (см. рис. 15.7) в счетно-управляющее устройство ЭВМ начинают поступать импульсы слежения за сортиментом. Эти импульсы производят вычитание из закодированного двоичного числа определенной величины другого двоичного числа, которое является шагом слежения. Происходит цифровое слежение за сортиментом. Когда записанное закодированное двоичное число станет равным нулю, выдается команда на сбрасывание сортимента.
Рассмотрим блок-схему работы ЭВМ (рис. 15.9). Автоматическое определение места сброски сортимента производится в блоке определения АМС (адреса места сброски). По поступающим в АМС кодам из блока приема породы и качества, блока измерения диаметров и блока измерения длины на выходе блока АМС вырабатывается закодированный адрес места сброски. Эта закодированная информация поступает в блок импульсного следящего устройства, после чего совместно с кодом расстояние слежения записывается в оперативное запоминаю-
щее устройство (ОЗУ). Блок импульсного следящего устройства по каждому импульсу перемещения сортимента на транспортере считывает на ОЗУ информацию о каждом сортименте, при этом изменяется закодированная информация о пути движения и он снова записывается в ОЗУ. Одновременно в этом блоке производится сравнение числа адреса места сброски сортимента с числом пройденного расстояния. Как только закодированное число, изображающее расстояние до места сброски, станет равным нулю, блок импульсного следящего устройства

Рис. 15.10. Блок-схема сортировочного устройства ЛВ-187
выдает сигнал на сброс сортимента в блок формирования управляющих сигналов на сброс, с выхода которого он поступает на исполнительные механизмы.
Аналогичный принцип работы слежения за сортиментом использован в сортировочной системе управления ЛВ-187. Устройство состоит из фотоствора 1 (рис. 15.10), магнитной головки записи 2, магнитных головок считывания 3, силового шкафа 4, пульта управления 5, головки размагничивания 6 и симистор-ных выключателей 7.
Фотоствор предназначен для определения положения сортиментов относительно тягового органа лесотранспортера. Он состоит из корпуса и элементов фотоавтоматики. Фотоствор располагается на эстакаде лесотранспортера таким образом, чтобы оператор имел возможность осмотреть передние и задние торцы проходящих сортиментов до их входа в створ элементов фотоавтоматики.
Головка записи предназначена для нанесения магнитной метки на тяговый орган лесотранспортера и состоит из магнитопровода и обмоток. Головки считывания предназначены для считывания этой магнитной метки с тягового органа лесотранспортера и состоят из магнитопровода и закрепленной на нем платы с герконом. Силовой шкаф предназначен для установки элементов коммутации силового оборудования. Пульт управления содержит органы управления устройством и технологическим оборудованием. Головка размагничивания предназначена для размагничивания тягового органа лесотранспортера. Симисторные выключатели предназначены для включения электромагнитов исполнительных механизмов (сбрасывателей) и устанавливаются у мест сброски.
Принцип работы устройства ЛВ-187 состоит в запоминании команд оператора, который адресует поступающие на лесо-транспортер сортименты в соответствии с их сортообразующими признаками. Адрес, задаваемый оператором кнопками с пульта, представляет собой пятиразрядный двоичный код, который изображает номер лесонакопителя. При проходе через фотоствор заднего торца сортимента на тяговом органе лесотранспортера при помощи головки записи наносится магнитная метка, которая при перемещении взаимодействует с магнитными головками считывания, установленными у каждого лесонакопителя. По сигналам, поступающим с этих головок в адресном регистре логической части устройства происходит продвижение информации о записанном операторе адреса для данного сортимента. При этом происходит сравнение кода адреса сортимента и номера места сброски (лесонакопителя). В случае совпадения адреса с номером лесонакопителя, где проходит сортимент, устройство вырабатывает управляющий сигнал для включения электромагнитов соответствующего сбрасывателя через сими-сторный выключатель.
Дата добавления: 2015-08-27; просмотров: 78 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ЛОКАЛЬНЫЕ СИСТЕМЫ СОРТИРОВКИ | | | СЧЕТНО-УПРАВЛЯЮЩЕЕ СОРТИРОВОЧНОЕ УСТРОЙСТВО |