|
Читайте также: |
Датчики размеров и перемещения служат для измерения линейных и угловых размеров и определения положения предметов и деталей.
Конечные выключатели. В этих датчиках сигнал управления возникает в результате воздействия на них движущейся части технологического агрегата (станка) в момент, когда эта часть приходит в определенное, заранее предусмотренное положение. Датчики механического типа обычно выполняют в виде жестких и подвижных упоров или кулачков и основаны на принципе подачи команды при возрастании силы или момента сверх установленной величины.
Конечные выключатели контактного типа (путевые выключатели и переключатели) предназначены для замыкания и размыкания электрической цепи управления. Они бывают простые и моментные. Как те, так и другие могут быть с самовозвратом либо без него. Простые приводятся в действие и срабатывают постепенно, по мере воздействия на них движущихся частей агрегата (станка). Моментные срабатывают мгновенно. Самовозвратные занимают исходное положение немедленно после прекращения на них воздействия. Датчики без самовозврата остаются в любом из двух положений после прекращения воздействия и для каждого нового переключения требуют нового воздействия. Простые переключатели применяют при скоростях перемещения свыше 0,4 м/мин, моментные — при скоростях менее 0,4 м/мин.
На рис. 2.1, а, показана схема простого стержневого переключателя с самовозвратом, имеющего одну пару замыкающих и одну пару размыкающих контактов. Работает датчик следующим образом: при нажатии упора подвижной части агрегата (станка) на стержень 2 последний опускается и вместе с собой опускает замыкающий контакт 3 и размыкающий контакт 4. При этом верхняя цепь управления включается, а нижняя выключается. При прекращении воздействия стержень 2 под действием пружины 5 возвращается в исходное положение.
Рычажной датчик (переключатель) с самовозвратом показан на рис. 2.1, б. При нажатии движущейся части агрегата (станка) на ролик 3 рычаг 4 поворачивается на угол примерно 12°. При этом подвижный контакт 5 размыкает правую цепь управления 6 и замыкает левую 1. При прекращении воздействия на ролик 3 пружина на оси 2 возвращает подвижные
части переключателя в исходное положение. Достоинством таких выключателей является возможность коммутирования электрических цепей с напряжением до 500 В и током до 5...10 А.
Если требуется получить сигнал от датчика при малом перемещении стержня и небольшом на него давлении, используют микропереключатели (рис. 2.1, в). Эти датчики подобны рассмотренному выше, но вместо рычагов и обычной пружины в них установлена плоская пружина 4. Подвижная часть агрегата (станка) воздействует на шток 3, который изгибает пружину 4, вызывая ее быстрое перемещение к противоположному
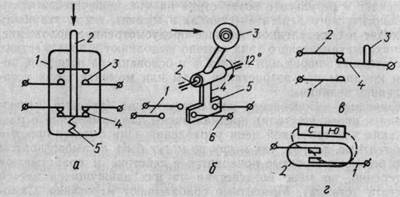
Рис. 2.1. Конечные выключатели
контакту 1. Как только воздействие на шток 3 прекратится, вся система приходит в исходное положение, т. е. контакт 2 замыкается.
Основным недостатком этих датчиков является износ контактов из-за механического соударения и их обгорания, что приводит к отказу. Среднее число срабатываний составляет 106 раз.
Для увеличения срока службы контактной группы их герметизируют или помещают в инертную среду. Такие путевые выключатели называются герконами (рис. 2.1, г). Они обладают высоким быстродействием и большим сроком службы (109 срабатываний). Геркон представляет собой два контакта 1 из пермаллоя, которые помещены в стеклянную колбу 2 диаметром до 3...5 мм. Управление контактами производится магнитным полем магнита или катушки, которые обычно размещаются на рабочем органе установки. При воздействии магнитного поля (показано пунктиром) на контакты они замыкаются, включая цепь управления. Недостатком таких путевых выключателей является малая коммутационная и перегрузочная способность
(20...60 Вт), максимальные переключаемые токи составляют 0,5 A, U=220 В. Имеются и другие переключающие устройства, которые будут рассмотрены в главе 5.
Индуктивные датчики и бесконтактные конечные выключатели. Из большого числа датчиков в системах автоматического управления технологическим оборудованием применяют чаще всего индуктивные датчики; они просты по конструкции, обладают высокой чувствительностью и точностью и имеют большой срок службы. Индуктивные датчики работают на переменном токе промышленной частоты и дают относительно высокое зна-
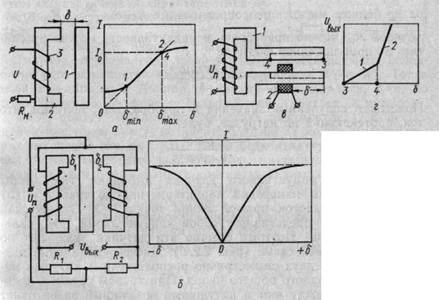
Рис. 2.2. Индуктивные датчики
чение выходной мощности, но на их работу большое влияние оказывает колебание частоты питающего напряжения.
Схемы основных типов индуктивных датчиков показаны на рис. 2.2. Одинарный датчик (рис. 2.2, а) используют для измерения малых перемещений. Для индуктивного датчика входной величиной является перемещение якоря, определяемое зазором δ, выходной — сила тока I н при заданном переменном напряжении питания U.

где Ζ — полное сопротивление катушки датчика; R — активное сопротивление обмотки и нагрузки, Ом; L ω — индуктивное
сопротивление катушки; ω = 2π f — угловая частота переменного тока с частотой f, Гц; L — индуктивность обмотки, Гн;
где W — число витков катушки; S — площадь сечения потока в воздушном зазоре (принимается равной площади сечения маг-нитопровода), м2; δ — величина воздушного зазора, м; Rm — сумма магнитного сопротивления магнитопровода и якоря. Так как магнитное сопротивление воздушного зазора го-
раздо больше магнитного сопротивления железа 2δ/S >> Rж, то ве-
личиной R ж можно пренебречь и индуктивность можно рассчитать по приближенной формуле
Подставив полученные значения и преобразовав, получим, что ток, протекающий по нагрузке, будет
Параметры индуктивного датчика выбирают так, чтобы в пределах зоны измерения характеристика датчика I Η= I (δ) представляла участок прямой линии точки 1, 2. Статическая характеристика представляет собой кривую линию, что является недостатком. Поэтому обычно эти датчики включают по дифференциальной схеме (рис. 2.2,б). Дифференциальные датчики состоят из двух симметрично расположенных катушек индуктивности и одного общего якоря. При точном среднем положении якоря между ним икатушками воздушный зазор будет одинаков (δ1 = δ2), а следовательно, одинаковы и индуктивные сопротивления катушек, тогда U вых = 0. При перемещении якоря изменяется магнитное сопротивление левой и правой частей датчика. Следовательно, будет изменяться индуктивность катушек и величина тока, протекающего по катушкам. При этом рабочий участок статической характеристики представляет собой прямую линию, выходящую из начала координат.
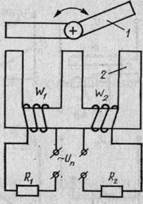
На базе индуктивных датчиков разработаны бесконтактные конечные выключатели (БВК). На рис. 2.3 приведена принципиальная схема такого конечного выключателя.
Недостатком индуктивных датчиков является сильная зависимость их характеристики от частоты питающего напряжения.
Для измерения больших перемещений применяют индуктивный датчик (точнее трансформаторный) с распределенными магнитными параметрами (см. рис.2.2, в). Такой датчик со-
Рис. 2.3. Схема бесконтактного переключателя
стоит из магнитопровода 1, по которой перемещается обмотка 2. При перемещении обмотки из точки 3 в точку 4 ЭДС обмотки увеличивается почти линейно. Такой датчик можно использовать как функциональный, для этого магнитопровод делают определенного профиля (показано пунктиром), при этом его статическая характеристика будет состоять из двух прямых 1 и 2 (рис. 2.2, г).
При повороте якоря 1 изменяется
магнитное сопротивление левой и правой частей датчика, вследствие чего изменяется индуктивность катушек W 1 и W2. Тогда если x 1→Tmin, то и I 1→Tmin, а при x 1→Tmax, I 2→Tmax, т. е. по сопротивлению R2 пойдет большой ток (контакт замкнулся), а по R\ пойдет меньший ток (контакт разомкнулся). Конечно, изменение токов I 1 и I 2 незначительно, но их можно усилить через усилитель (см. рис. 2.3). Такой бесконтактный выключатель аналогичен конечному выключателю, имеющему один замыкающий и один размыкающий контакты. Основным достоинством БКВ является отсутствие контактных пар, что определяет высокую долговечность эксплуатации.
Реостатные и потенциометрические датчики. Реостатные и потенциометрические датчики выполняются в виде проволочных сопротивлений, намотанных на каркас прямоугольного или круглого сечения.
Схемы включения (рис. 2.4, а, в, д, ж) и характеристики датчиков (рис. 2.4, б, г, е, з) приведены на рис. 2.4. Они плавного действия, безынерционные. По конструкции датчики могут быть с прямолинейным и кольцевым перемещением движка. В последнем случае датчик служит для замера углов поворота. В зависимости от характера воспроизводимого датчиком выходного сигнала потенциометры делятся на линейные и функциональные (рис. 2.4, е, з), у которых сопротивление по длине каркаса имеет нелинейный характер, для чего каркасы делают определенного профиля или с шунтами (рис. 2.4,(д, ж).
Наибольшее применение получила схема потенциометриче-ского датчика (рис. 2.4, в), так как эта схема обеспечивает отсутствие тока при начальном положении ползунка, когда х = 0. Как видно из статической характеристики, имеется погрешность Δ U, вносимая шунтирующим действием нагрузки R H, величина которой зависит от относительного перемещения ползунка и коэффициента нагрузки. Для определения этой по-
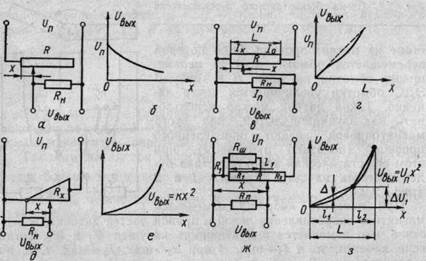
Рис. 2.4. Реостатный и потенциометрические датчики
грешности составим уравнение Кирхгофа для отдельных участков электрической цепи
I 0 =Ix+I н; U П= IxRx + I -(R-Rx); IxRx=I н R н
Определим токи I 0 и I Н через I Д, решая совместно первое и третье уравнения I Н= Ix(Rx/R н ) и I 0 = Ix (1- Rx/R н).
Подставив значение I 0 во второе уравнение, получим

Отсюда
где

Тогда выходное напряжение будет

или
Обозначив R/R н = α; α— коэффициент нагрузки и Rx/R = X /L =
= К — относительное перемещение ползунка, получим UB =
При RH→∞ выходное напряжение составит
Тогда погрешность ΔU между идеальной характеристикой (рис. 2.4,г — пунктир) и реальной будет
Из формулы видно, что с увеличением α уменьшается ошибка в измерении выходного напряжения, т. е. увеличивая
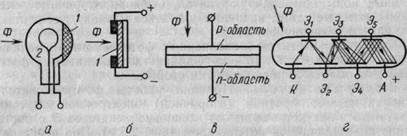
Рис. 2.5. Фотоэлектрические датчики
коэффициент нагрузки а, можно получить идеализированную статическую характеристику, что очень важно при точных измерениях.
К недостатку реостатных и потенциометрических датчиков следует отнести наличие контактной пары. Достоинством является большая мощность управления, стабильность характеристик и простота конструкций.
Фотоэлектрические датчики. Для дистанционного измерения перемещений применяются фотоэлектрические датчики. Принцип работы этих датчиков основан на фотоэлектрическом эффекте. Различают следующие фотоэлектрические датчики: фотоэлементы, фоторезисторы, фотодиоды и фототранзисторы.
Фотоэлемент представляет собой стеклянную вакуумную колбу с нанесенным с одной стороны слоем катода 1 и анода 2 (рис. 2.5,а). В качестве катода применяют щелочные металлы (сурьмяно-цезиевый, кислородно-цезиевый катод и др.). Под действием светового потока Φ и приложенного напряжения электроны, вырванные с поверхности катода, двигаются к аноду, замыкая электрическую цепь. Это — явление
внешнего фотоэффекта. Величина фототока на рабочем прямолинейном участке характеристики определяется уравнением
I ф = k Ф,
где I ф — величина фототока, мкА; k — коэффициент пропорциональности; Φ — световой поток, лм.
При отсутствии светового потока электроны находятся в связанном состоянии и не покидают поверхности металла, хотя некоторые из них и могут под действием различных причин достигнуть анода. В этом случае в цепи появляется очень незначительный по своей величине так называемый темновой ток.
Для того чтобы увеличить чувствительность фотоэлементов, стеклянную колбу наполняют инертным газом (аргоном) под давлением 10-3 МПа. Движущиеся с катода электроны при этом ионизируют молекулы газа, а образующиеся при этом положительные ионы бомбардируют катод, выбивая вторичные электроны, которые также начинают двигаться к аноду, увеличивая тем самым величину фототока.
Чувствительность газонаполненных фотоэлементов увеличивается примерно в 7...10 раз. Однако газонаполненные фотоэлементы обладают инерционными свойствами.
Фотоумножитель. Принцип работы фотоумножителя основан на многократной (вторичной) электронной эмиссии. Для этого в них устанавливают несколько эмиттеров Э с постепенно повышающимся потенциалом (рис. 2.5,г). Под действием светового потока Φ с поверхности катода вырываются электроны, которые начинают двигаться к первому эмиттеру Э1, так как у него более положительный потенциал, нежели у катода К. Эти электроны бомбардируют поверхность эмиттера Э1 и вырывают новые вторичные электроны, которые начинают двигаться под действием большого потенциала на второй эмиттер Э2 и т. д. Такое лавинообразное нарастание потока электронов увеличивает величину фототока. Усиление по количеству электронов в этих фотоумножителях достигает 108.
Ток фотоумножителя определяется уравнением
/ф = σn k Φ,
где σ — коэффициент вторичной эмиссии; n — количество эмиттеров.
Чувствительность таких умножителей достигает 100... 1000 А/лм.
Характерной особенностью фотоэлементов является спектральная характеристика, под ней понимают длину волны источника излучения, при которой имеет место максимальное значение фототока. Например, сурьмяно-цезиевый катод имеет максимальную чувствительность при длине волны 0,3 мк.м, а серебряннокислородноцезиевый при 0,8 мк.м.
Достоинством фотоэлементов является высокое быстродействие. Так время пролета электронов составляет 10-9 с. Недостатком следует считать ограниченный срок службы из-за постепенного уменьшения фотоэмиссии и незначительную механическую прочность.
Фоторезисторы представляют собой светочувствительный слой полупроводника (селен, сернистый свинец, сурьма) (рис. 2.5, б). Работа фоторезистора основана на резком изменении сопротивления полупроводникового слоя 1 при его освещении. При этом электроны не покидают полупроводник, а остаются в нем, являясь носителями зарядов электричества. Это есть явление внутреннего фотоэффекта. Таким образом, под действием света и приложенного напряжения замыкается электрическая цепь. Особо следует отметить, что фоторезисторы изменяют свою характеристику (величину силы тока) при изменении температуры окружающей среды.
Чувствительность фоторезисторов выше чувствительности фотоэлементов. Фоторезисторы также характеризуются так называемым темновым током, численная величина которого зависит от приложенного напряжения, а также и от температуры окружающей среды. Фоторезисторам свойственна инерционность процесса нарастания фототока при его освещении, что является недостатком. Различные полупроводниковые материалы, из которых получают светочувствительный слой фоторезистора, имеют различные спектральные характеристики. Основным достоинством фоторезисторов является их долговечность.
Фотодиоды, фототранзисторы, фототиристоры. Фотодиоды могут работать в двух режимах — фотогенераторном (вентильном) и фотодиодном. На рис. 2.5, в показана схема фотодиода, работающего в фотогенераторном режиме. В этом случае он генерирует собственную ЭДС при освещении переходного слоя p и n -областей.
Возникновение ЭДС объясняется тем, что в результате поглощения кванта света в области p - n -перехода (или вблизи от перехода) отдельные электроны увеличивают свою энергию и разрывают межатомные связи в кристалле. В результате разрыва связей с обеих сторон перехода или с одной его стороны образуются свободные электроны и дырки.
Поле p - n -перехода сортирует возникшие носители, а именно: электроны переходят в область с n -проводимостью, а дырки — в область с р -проводимостыо. В результате область n заряжается отрицательно, а область p — положительно.
Новейшие типы вентильных фотоэлементов (кремниевые) обладают наибольшим КПД. Они преобразуют 7...10% световой энергии в электрическую. При холостом ходе ЭДС кремниевого элемента может достигать 0,5 В.
Статическая характеристика таких элементов аналогична характеристике фоторезисторов, но обладает большей чувствительностью. С динамической точки зрения они являются безынерционными элементами. К числу недостатков следует отнести изменение характеристик при изменении температуры.
При работе в фотодиодном режиме к нему прикладывается обратное напряжение (рис. 2.6, а). При этом увеличивается сопротивление запорного слоя и электрическая цепь будет разомкнута. При освещении запорного слоя образуются электроны и дырки, которые преодолевают сопротивление запорного слоя


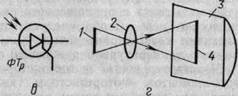
Рис. 2.6. Схемы полупроводниковых фотодатчиков
под действием обратного напряжения. Таким образом здесь фо-тоток является обратным током фотодиода, при этом его величина зависит от величины светового потока.
Фототранзистор (рис. 2.6, в) устроен так же, как и транзистор, но имеет в корпусе отверстие, закрытое стеклянной линзой. Под действием светового потока в базе фототранзистора образуются носители зарядов, которые и создают ток в транзисторе, включенном по схеме с общим эмиттером. Чувствительность таких фототранзисторов выше, чем чувствительность фотодиодов.
Фототиристор — полупроводниковый элемент (рис. 2.6, в), который имеет три p - n -перехода. Разница между ними состоит в том, что переключение фототиристора (открыт —закрыт) можно производить не только током управления, а и за счет светового потока, проходящего через отверстие в корпусе. Это свойство фототиристора широко используется для создания бесконтактного переключающего устройства. Так, при облучении фототиристора источником света от светодиода замыкается электрическая цепь, в которую включена нагрузка. Фотоэлектрические датчики получили очень широкое применение в различных автоматических устройствах.
Оптические датчики телевизионного измерения. Принцип действия этих датчиков основан на измерении телевизионного
изображения предмета. На рис. 2.6, гизображена принципиальная схема оптического датчика. Измеряемый предмет 1 проецируется с помощью оптической системы 2 на фоточувствительный слой передающей телевизионной трубки 3. Измерение размеров проекции 4 производится разверткой электронного луча трубки, который, пересекая тень изображения, выдает соответствующие сигналы, соответствующие размерам измеряемого предмета. Основным достоинством таких датчиков является возможность измерения крупногабаритных предметов (например, измерение длины, хлыста, площади торцов пачки сортиментов), а также определение геометрической формы измеряемых предметов.
Источники излучения. В качестве источников излучения для фотоэлектрических датчиков используются лампы накаливания, газоразрядные лампы, светодиоды и лазеры. Основными характеристиками источников являются спектры излучения.
Лампы накаливания (схемное изображение показано на рис. 2.7, а) имеют непрерывный спектр излучения. Обычно применяются лампы МН 2,5... 0,5, МН 26... 0,12 и др.
Газоразрядные лампы (рис. 2.7, б) представляют собой стеклянный или кварцевый корпус, наполненный газом. Эти лампы применяются для непрерывного или импульсного свечения (Дкс Ш-200). Недостатком этих ламп являются большой габарит и сложность включения. Достоинством — возможность получения любого спектра излучения.
Светодиод (рис. 2.7, в) является полупроводниковым электролюминесцентным устройством, излучающим кванты света в различных его спектрах. Диод — это двухслойный полупроводник. Если к такому диоду приложить напряжение в прямом направлении (по диоду потечет ток), то возникает интенсивная инжекция и рекомбинация носителей заряда в области p - n -перехода, а следовательно, выделяется лучистая энергия. Диоды можно возбуждать постоянным или переменным током. Светодиоды также изготовляются из кремния, арсенида галлия, сульфида кадмия, фосфора и т. д.
Многоэлементные светодиоды, которые состоят из набора элементарных светодиодов, используются как цифровые индикаторные устройства; они используются также при создании микроминиатюрных преобразователей частоты, усилителей, переключателей устройств и т. д.
Достоинством светодиодов является высокий КПД, возможность модуляции излучения по любому закону, высокая надежность.
Лазеры. В последнее время в технике в качестве излучателя лучистой энергии находят широкое применение твердотельные полупроводниковые лазеры. В состав лазерного излучателя обычно входят излучатель 1 (рис. 2.7, г) и блок пита-
2 Заказ № 1275 ' 33
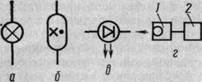
Рис. 2.7. Источники излучения
Рис. 2.8. Сельсины
ния 2. Излучение может быть непрерывным и импульсным. Для этих целей применяют газовые лазеры. Главным достоинством лазерного излучателя является малый диаметр лазерного пучка
(d = 0,7...0,2 мм).
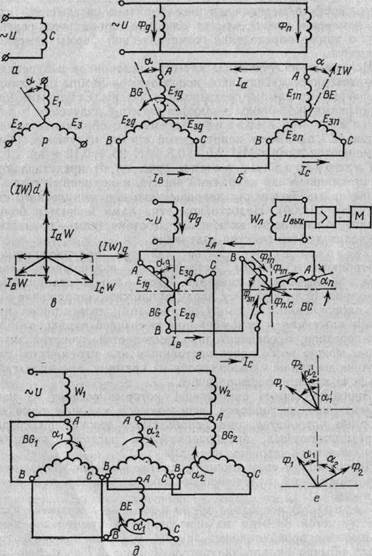
Сельсины. Сельсины представляют собой самосинхронизирующийся электрический двигатель переменного тока. Они служат для измерения углов поворота и дистанционной передачи угла поворота вала. Конструктивно выполняются в виде ротора и статора с обмотками. Как правило, они работают парами. На сельсине-датчике задается угол поворота, а сельсин-приемник отрабатывает этот угол поворота или приводит к действию исполнительный механизм. Соединение сельсинов производится электрической цепью. Классифицируются сельсины на контактные и бесконтактные. Они также бывают однофазные и трехфазные.
Принцип работы сельсина состоит в следующем. При включении статорной обмотки в сеть переменного тока (рис. 2.8, а) она создает пульсирующий магнитный поток, который индуктирует в каждой фазе роторной обмотки ЭДС, зависящую от угла его поворота а, т. е.
Ег = E max cos α; E2 = Emaxcos(α+120°);
E3 = Emaxcos(α+240°),
где Emax — максимальная ЭДС при совпадении оси одной из обмоток ротора Ρ с осью статора С.

Фс —магнитный поток возбуждения статора, Вб; W — число витков обмотки ротора; f — частота тока, Гц.
По величине этих ЭДС можно судить об угле поворота вала.
Наиболее широкое применение получили сельсины в следящих системах при дистанционной передаче угла поворота. На рис. 2.8, б приведена индикаторная схема включения сельсинов. Сельсин BG является сельсином-датчиком, a BE сельсином-приемником. Статорные обмотки возбуждения образуют переменные магнитные потоки Фд и Фш которые наводят в обмотках роторов соответствующие ЭДС.
Если оси фазных обмоток роторов расположены в пространстве одинаково, то E 1д = E 1п; Е 2Д =Е 2П, E 3д = Eзп; т. е. потенциалы точек A; В; С равны цепи, то токи IA = 0; IB =0;IC=0.
При повороте ротора BG на угол α на вводимые ЭДС становятся различными и по цепи потекут уравнительные токи:
При повороте ротора датчика BG на угол α при заторможенном роторе-приемнике BE в его статоре будет наводиться U вых, пропорциональное углу поворота αд, при этом U вых, = min при Δα = 0° и U вых, = max при Δα = 90°. Значение U вых, подается на усилитель (см. рис. 2.8, г) и далее на электродвигатель М, направление вращения которого будет зависеть от направления рассогласования Δα (фазы напряжения), т. е. электродвигатель Μ начнет вращаться в направлении ротора-датчика BG до тех пор, пока Δα=0.
В тех случаях, когда требуется производить суммирование углов поворота двух валов, применяются сельсины-дифференциалы. Они могут включаться по индикаторной и трансформаторной схемам. На рис. 2.8, д приведена индикаторная схема включения сельсина-дифференциала BE. При повороте роторов сельсинов-датчиков BG 1 и BG2 на углы α1 и α 2 в их обмотках наводятся различные ЭДС, по замкнутым электрическим цепям потекут уравнительные токи, которые в трехфазных обмотках сельсина-дифференциала BE создают два магнитных потока, взаимодействие которых поворачивает их соответственно углам α1 и α 2. При повороте BG1 на угол α1 магнитный поток сельсина-дифференциала BE повернется в противоположном направлении на угол α1 ΄ (рис. 2.8, е), а при повороте ротора BG2 на угол а2 магнитный поток сельсина-дифференциала тоже повернется в противоположном направлении на угол а2'. Эти магнитные потоки Φ1 и Ф 2 создают синхронизирующий момент, который стремится вращать роторы сельсина-дифференциала до тех пор, пока оба магнитных потока не совпадут по своему направлению, а это возможно лишь тогда, когда Δα = α1 - α 2, т. е. имеет место разница углов поворота α1 и α 2. Если ротор BG2 повернуть против часовой стрелки, то для совпадения их магнитных потоков необходимо, чтобы Δα = α1 и α 2 (сумма углов поворотов).
Работа сельсина-дифференциала в трансформаторном режиме — обмотка возбуждения W2 отключается от напряжения питания U, при этом ее напряжение (выходной обмотки W2) будет пропорциональным разнице или сумме углов поворота αϊ и а2.
Недостатком таких сельсинов является наличие контактных щеток, которые окисляются и обгорают, а повышение надежности контакта, когда щетки плотнее поджимаются к кольцам, приводит к снижению точности работы сельсина из-за увеличивающегося трения сопротивления повороту ротора.
Для устранения этого недостатка применяют бесконтактные сельсины. На рис. 2.9 приведена схема бесконтактного сельсина. Сельсин состоит из корпуса-магнитопровода 1, обмотки возбуждения 2, которая крепится на статоре корпуса, трехфазной выходной обмотки 3, которая также расположена
на статоре, ротора 4, состоящего из двух пакетов, разделенных немагнитным материалом 5. Обмотка возбуждения на статоре расположена так, что ее ось перпендикулярна оси выходной обмотки. При таком взаимном расположении обмоток они не оказывают друг на друга никакого магнитного воздействия. Для того чтобы магнитный поток обмотки возбуждения 2 воздействовал на выходную обмотку 3, применяется ротор-магни-топровод специальной формы в виде двух пакетов, разделенных немагнитным материалом 5. Наличие этих двух пакетов дает возможность изменять направление магнитного потока на 90°.
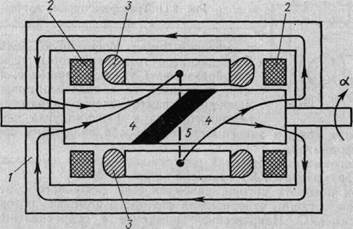
Рис. 2.9. Бесконтактный сельсин
Принцип наведения ЭДС в выходной обмотке состоит в том, что при повороте ротора поворачивается и магнитный поток, который пересекает трехфазную обмотку возбуждения, индуктирует в каждой из них соответствующую ЭДС, величины которых зависят от угла поворота ротора. Величина наводимой ЭДС будет меньше, чем у контактного сельсина. Это объясняется наличием большого магнитного сопротивления в дополнительных воздушных зазорах и большого рассеивания магнитного потока на валу ротора и т. д.
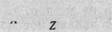
Вращающиеся трансформаторы. Они являются электрическими машинами с не явно выраженными полюсами (рис. 2.10, а), имеют вращающий ротор и неподвижный статор, которые набраны из листовой электротехнической стали. В пазах ротора и статора уложены по две перпендикулярно расположенных обмотки Wp, Wc. Воздушный запор между ротором
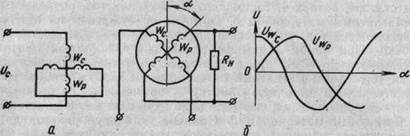
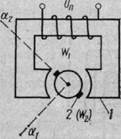
Рис. 2.10. Вращающиеся трансформаторы Рис.2.11. Трансформаторный датчик
и статором имеет постоянную величину. Вращающиеся трансформаторы позволяют преобразовывать угловое движение, например, выходного вала силового привода в непрерывно изменяющееся напряжение переменного тока в функции угла поворота sin α или cos α в зависимости от способа включения обмоток трансформатора.
Диаграмма напряжений синусно-косинусного вращающегося трансформатора СКВТ показана на рис. 2.10, б.
При повороте ротора, кинематически связанного с перемещаемым органом, относительно статора в обмотках ротора наводится ЭДС. Напряжение, снимаемое с сопротивления нагрузки, включенного во вторичную обмотку, изменяется в функции угла поворота по закону
где α — угол поворота; k — коэффициент трансформации.
Трансформаторный датчик углов поворота. Датчик состоит из магнитопровода 1 (рис. 2.11), катушки W1, к которой подводится напряжение питания U П и обмотки 2 (W2), выполненной в виде рамки, которая поворачивается на угол от α1 до α 2 -При горизонтальном положении рамки 2 наводимая в ней ЭДС равна нулю, при ее повороте увеличивается ЭДС, по которой можно судить об угле поворота. При переходе угла поворота через 180° фаза ЭДС изменяет свое значение.
Емкостные датчики. Их используют для высокоточных измерений линейных и угловых размеров. Принцип действия этих датчиков основан на том, что с изменением контролируемого ими размера меняется емкость конденсатора, включенного в электрическую схему. Схемы емкостных датчиков приведены
на рис. 2.12. В датчике, показанном на рис. 2.12, а, при перемещении пластины 2 относительно неподвижной пластины 1 изменяется емкость между ними.
Эти датчики с изменяющимся зазором δ имеют нелинейную характеристику. Емкость такого плоского конденсатора составляет
C = εS/ (δ — Δδ),
где ε — диэлектрическая проницаемость среды, пФ/см; S — площади пластин, см2; δ — расстояние между электродами, см; Δδ — изменение зазора, см.
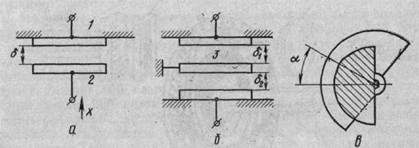
Рис. 2.12. Емкостные датчики
Преобразовав выражение, получим, что

При малых перемещениях Δδ<<δ, а величиной (Δδ/δ)2 можно пренебречь, тогда емкость конденсатора и ее изменение АС составят

следовательно, при малых перемещениях δ статическая характеристика будет линейной. Эти датчики используются для измерения малых перемещений (до 1 мм). Для увеличения чувствительности емкостных датчиков применяют дифференциальный датчик (рис. 2.12, б). В нем подвижной является средняя пластина 3. В емкостном датчике, показанном на рис. 2.12, в, емкость меняется за счет изменения активной площади пластин (на схеме заштрихована). Такие датчики применяют для измерения углового перемещения. Емкость такого датчика линейно зависит от угла поворота α и составляет
Емкостные датчики имеют высокую чувствительность ввиду отсутствия помех, малые габарит и массу. Недостатками их являются: сравнительно небольшие контролируемые размеры, необходимость тщательной экранировки с тем, чтобы исключить влияние посторонних электрических полей и паразитных емкостей.
Цифровые датчики размеров, перемещений. Учитывая перспективы создания микропроцессорных систем управления лесообрабатывающим оборудованием, манипуляторами, робо-
Рис. 2.13. Цифровой датчик углов поворота
тами, представляется необходимым рассмотреть соответствующие цифровые датчики.
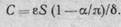
Схема фотоэлектрического преобразователя считывания углового перемещения в код приведена на рис. 2.13. На кодированном валу 2 закреплен кодированный диск, представляющий собой стеклянное основание с кодовой маской в виде концентрических кодовых дорожек с прозрачными и непрозрачными сегментами. Осветитель, состоящий из лампы 3 и конденсора 4, формирует лучистый поток, падающий на кодированный диск 1. В момент съема информации луч света, проходя через прозрачные сегменты кодовых дорожек диска и ограничивающую целевую диафрагму 5, освещает фотоприемники 6, усиленные сигналы с которых принимаются за единицы, отсутствие сигналов через непрозрачные сегменты соответствует нулям. Датчик имеет высокую разрешающую способность 12...16 двоичных разрядов на один оборот вала, т. е. от 5' до 20". Следовательно, каждому углу поворота соответствует свое значение двоичного кода.
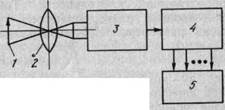
Рис. 2.14. Схема те-левизионно - вычислительной системы
Датчик используется для контроля перемещений узлов машин, может быть использован для измерения размеров лесоматериалов. Введение дополнительного, растрового отсчета повышает разрешающую способность.
Импульсные датчики (например, ПДФ-3) служат для преобразования угла поворота рабочих органов в число импульсов и угловой скорости в частоту следования импульсов.
Выходные сигналы датчика — две серии импульсов по двум раздельным каналам. Число импульсов на оборот — 600. Импульсы двух серий сдвинуты относительно друг друга на 90 электрических градусов. Основной деталью датчика является металлический модуляционный диск, закрепленный на валу, на диске имеется 600 пазов. На неподвижной индикаторной пластине также 600 пазов. За индикаторной пластиной расположены фотодиоды, за диском — светоизлучатели. Сигналы с фотодиодов усиливаются и передаются на цифровые счетчики импульсов. Таким образом измеряется длина круглых лесоматериалов, пиломатериалов. Датчик устанавливается на ведущий шкив продольного транспортера. Путь прохождения бревна, доски в створе оптического регистратора соответствует длине этого объекта, которая представляется соответствующим количеством импульсов. Исследования, проведенные ВЛТИ, показали, что датчики длины лесоматериалов ПДФ-3 достаточно просто сопрягаются с микроЭВМ.
Телевизионно-вычислительные системы измерения размеров лесоматериалов и объектов роботизации. Основаны на преобразовании и обработке видеоинформации (рис. 2.14) и включают в себя телевизионный датчик 3 с оптической системой 2, воспринимающей изображение объекта 1, устройство обработки 4, осуществляющее амплитудно-временную селекцию видеосигнала, измерение информативных параметров и преобразование результатов измерения в цифровую форму, микроЭВМ 5, накапливающую и обрабатывающую поступающую информацию по заранее определяемым алгоритмам распознавания. Для измерения координат и размеров объекта применяют телевизионные автоматы с времяимпульсной базой. При перемещении сканирующего луча в направлении оси времени границы измеряемого объекта (диаметра бревна) будут последовательно пересекаться в точках Х1 и Х2 в моменты времени Х1 и Х2, т. е. каждому размеру будет соответствовать видеоимпульс
определенной длительности. Точность способа определяется линейностью развертывающей функции и стабильностью размера развертки. Искомый размер объекта (диаметр бревна, хлыста)
d П = kt и,
где k — коэффициент пропорциональности, связывающий размер оптической проекции d П измеряемого объекта на фотослое преобразователя свет-сигнала с длительностью видеоимпульса t и.
Для измерения размера объекта длительность видеоимпульса сравнивается с длительностью заданного тактовым генератором импульса t3, т. е. n=t и /t3 и d П = knt3, = k1n, k1— const. Определяя число n, можно определить размер оптической проекции измеряемого объекта и в конечном счете искомый размер (диаметр лесоматериала) d. В этом и заключается принцип построения телевизионных датчиков измерения геометрических параметров.
Для уменьшения погрешностей измерения, обусловленных несовершенством оптического и телевизионного каналов (нелинейные искажения, неравномерность освещения и уровня фона и др.) применяется принцип центрального поля. Измерение производится только в центральной части, размер которой определяется допустимыми погрешностями.
Телевизионные датчики имеют большие возможности измерения параметров контролируемых объектов. Например, промышленные телекамеры имеют стандартные развертки из 312 и 625 строк в кадре. В сущности каждая строка — это отдельный измеритель с выдачей соответствующего видеосигнала, что позволяет измерять с заданной точностью параметры объектов автоматизации, роботизации. В этой связи обработка большого числа видеосигналов возможна только с использованием микро-ЭВМ. Для этого необходимо согласовать информационные характеристики телекамеры с характеристиками канала ввода ЭВМ и параметрами ОЗУ. Функциональная схема устройства ввода телевизионного изображения в микроЭВМ показана на рис. 2.15.
Видеосигнал ВС с телекамеры ТВ подается на амплитудный дискриминатор АД, имеющий регулировку порога срабатывания РК. Проквантованный на два значения 0 и 1 видеосигнал поступает на вход регистра фрагмента РФ, представляющего собой регистр сдвига на 12 разрядов. Вытеснение поступающей информации происходит под действием продвигающих импульсов (ПИ), подаваемых на регистр сдвига с тактового генератора ГТИ через схему И4. Занесенный фрагмент строки из регистра фрагмента через выходные ключи ВК по команде КЗ считывается в микроЭВМ. Выбор фрагмента строки, подлежа-
щего вводу в микроЭВМ в данном полукадре, осуществляется схемой выбора фрагмента, состоящей из трех счетчиков: полукадров СП, фрагментов СФ, выборок СВ и цифрового компаратора ЦКР. Строка разбивается на фрагменты при помощи счетчика выборок, который через каждые 12 импульсов тактового генератора выдает единицу на счетчик фрагментов. Номер вводимого фрагмента должен соответствовать номеру текущего полукадра, который фиксируется в счетчике полукадров. При совпадении кодов, занесенных в счетчики, на выходе компаратора появляется низкий уровень (сигнал: «конец преобразования» —
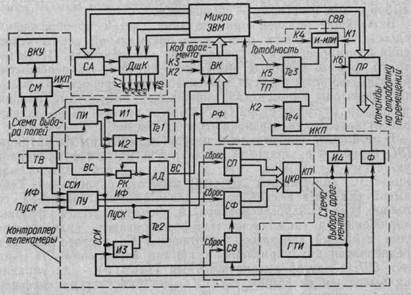
Рис. 2.15. Функциональная схема устройства ввода телевизионного изображения в микроЭВМ
КП). Сигнал КП запрещает прохождение тактовых импульсов через схему И4, в результате чего вытеснение информации прекращается и код фрагмента фиксируется в регистре РФ. Сформированный из сигнала КП импульс ИКП формирователя Φ возбуждает триггер Тг4 «разрешение считывания», с инвертирующего выхода которого в микроЭВМ подается сигнал «требование прерывания» ТП. Синхронизация ввода-вывода СВВ информации осуществляется при помощи команд К1... К6, выдаваемых с дешифратора команд ДшК. При обращении микроЭВМ к контроллеру телевизионного датчика программа опрашивает, кроме регистра фрагмента, еще два триггера: триггер Тг1 «выбор поля» и триггер Тг2 «измерение». Переход
триггера «измерение» в нулевое состояние сигнализирует об окончании цикла ввода изображения. Сброс триггера происходит в том случае, если к моменту прихода строчного синхроимпульса ССИ сигнал КП отсутствует. Такая ситуация возникает только на правой границе регистра, если последний фрагмент содержит меньше 12 элементов разложения.
Использование в качестве датчика телекамеры с чересстрочной разверткой делает необходимым введение в устройство ввода изображения специальной схемы для идентификации полукадра. Для этой цели служит схема выбора полей. Четному полукадру соответствует возбужденное состояние триггера «выбор поля», нечетному — сброшенное.
Важнейшей задачей при создании систем преобразования видеосигнала является построение оптимальной схемы управления формированием и обработкой видеосигнала. Известно, что от формы тактовых импульсов, степени их перекрытия, крутизны фронтов зависит эффективность переноса. На выход формирователя видеосигнала проникают импульсные наводки (например, от транзистора сброса), и от степени их подавления зависит качество телевизионного изображения.
В этой связи представляют интерес телекамеры на матрицах ПЗС (приборы с зарядовой связью). Рассмотрим функциональную схему телекамеры (рис. 2.16) на среднеформатной матрице ПЗС, содержащей 288x232 элемента разложения. Телекамера включает в себя также два тактовых генератора, состоящих из синхрогенераторов и формирователей фазовых напряжений, а также усилитель-формирователь видеосигнала. Один тактовый генератор, работающий на частоте 280 кГц, предназначен для управления секциями накопления СН и памяти СП, а другой высокочастотный (14 МГц)—для управления выходным регистром ВРг. Камера работает на телевизионное воспроизводящее устройство без чересстрочной развертки. Растры обоих полей идентичны и имеют по 288 строк на прямом ходе кадровой развертки и по 24 строки на обратном. В этом случае снижаются требования к качеству синхронизации, а отличие кадровой или строчной частоты от стандартных составляет не более 0,2 %· Для передачи изображения в первом поле используются нечетные строки, а четные гасятся, во втором поле — наоборот. Во время обратного хода кадровой развертки осуществляется 144 переноса заряда из секции накопления в секцию памяти. При этом частота всех переносов в этих двух секциях одинакова — 94 кГц:
Для повышения эффективности переноса заряда и улучшения контрастно-частотной характеристики в камере использована оптическая инжекция фонового заряда, осуществляемая при помощи двух инфракрасных излучателей (ИК). Формирователи фазных напряжений выполнены по схеме кольцевого
распределителя импульсов на Д-триггерах и допускают начальную установку в три состояния: 100, 010, 110. Первое состояние необходимо для накопления заряда в одном поле, второе — в другом поле, третье — для хранения заряда в секции памяти или гамма-коррекции в секции накопления. Перекрытие между импульсами разных фаз обеспечивается собственными задержками интегральных схем.
При решении практических задач возникает необходимость применения дополнительных мер повышения достоверности преобразования светового поля изображения в электрический сигнал. К ним относятся рациональный выбор освещения, при-
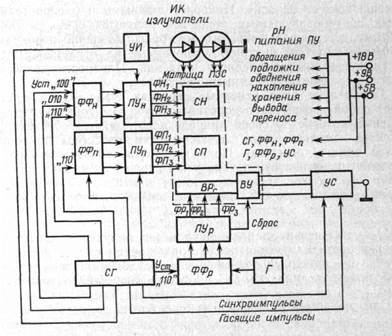
Рис. 2.16. Функциональная схема телекамеры с матрицей ПЗС
менение светофильтров и амплитудных корректоров, ограничение анализируемой области изображения в пределах линейного участка растра телевизионного датчика, что дает возможность минимизировать аппаратные и программные средства. Применение специальных алгоритмов дает возможность создавать распознающие устройства высокого быстродействия.
Исследования ВЛТИ, ЦНИИМЭ, СибТИ позволили создать телевизионно-вычислительные комплексы измерения, распознавания параметров круглых лесоматериалов, пиломатериалов.
Использование комплексов из телевизионных датчиков и микропроцессоров дает надежное решение проблемы автоматизации контроля параметров хлыстов, бревен, пиломатериалов в различных управляемых технологиях переработки древесины.
Дата добавления: 2015-08-27; просмотров: 222 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ДИНАМИЧЕСКИЕ И ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЭЛЕМЕНТОВ | | | ДАТЧИКИ ДЕФЕКТОСКОПИИ ДРЕВЕСИНЫ |