Читайте также:
|
Будем полагать, что движение элементов, систем автоматики описывается линейным дифференциальным уравнением с постоянными коэффициентами (а0, а1..., аn; b0, b1,..., bm) пo входному (управляющему) воздействию g(t)

(1.10)
Запишем это уравнение в операторной форме при нулевых начальных условиях

(1.11)
Выполним преобразование уравнения (1.11):

(1.12)
Отношение изображения по Лапласу выходной величины к изображению входной величины и называется передаточной функцией системы (или элемента).
Знаменатель передаточной функции W(P), приравненный нулю, называется характеристическим уравнением системы или элемента автоматики D(P).
D(Ρ) = а0Рп + а1Рп-1 +... + ап-1Р + ап = 0. (1.13)
Рассмотрим передаточную функцию системы из n последовательно соединенных звеньев (рис. 1.2, а). Определим передаточные функции отдельных звеньев (элементов):

Перемножим передаточные функции звеньев

После сокращения получим выражение передаточной функции разомкнутой системы последовательно соединенных звеньев W(P)раз.

(1.14)
как отношение изображения выходного сигнала Y(P) к изображению входного сигнала Х(Р) системы.
Пусть система состоит из n параллельно соединенных звеньев (рис. 1.2,б). Очевидно, что входной сигнал x(t) и его
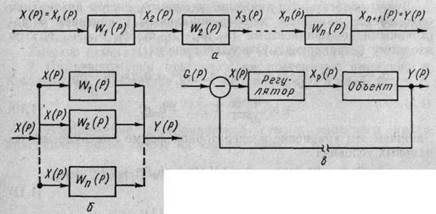
Рис. 1.2. Структурные схемы автоматических систем
изображение X(Р) будет одинаковым для всех n -параллельно включенных звеньев. Выходные сигналы y1(t); y2(t);...; yn(t), а следовательно и их изображения будут различными, так как передаточные функции W1(P); W2(P);...; Wn(P) зависят от параметров характеристик звеньев. По правилу сложения запишем y(t)—y1(t)+y2(t)+... + yn(t), с учетом линейности изображений (1.5) справедливо также Y(P) = Y1(Ρ) +... + Υn(Ρ) или Y(P) = Wl(P)X(P) + W2(P)X(P)+... + Wn(P)X(P). Разделим это выражение на Х(Р), получим

(1.15)
т. е. передаточная функция системы параллельно соединенных звеньев представляет собой сумму передаточных функций отдельных звеньев.
Определим передаточные функции автоматической системы регулирования (АСР) в разомкнутом и замкнутом состоянии. На рис. 1.2, в показана АСР с разомкнутой отрицательной обратной связью. Передаточные функции: регулятора W (Р)рег =

объекта
АСР в разомкнутом
состоянии

(1.16)
Замкнем регулятор и объект единичной отрицательной обратной связью, т. е. X(P) = G(P)-Υ(Ρ). Подставим это выражение в формулу (1.16)

После преобразования получим выражение передаточной функции АСР по каналу регулирующего воздействия W (Ρ) зам в замкнутом состоянии
(1.17)
Нетрудно понять, что замкнутая система с единичной положительной обратной связью имеет передаточную функцию
(1.18)
Дата добавления: 2015-08-27; просмотров: 103 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| КЛАССИФИКАЦИЯ ЭЛЕМЕНТОВ АВТОМАТИКИ | | | ЧАСТОТНЫЕ ПЕРЕДАТОЧНЫЕ ФУНКЦИИ И ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ |