Читайте также:
|
Робот первоначально находится в покое, но при определенном уровне освещенности он переходит в «активную» фазу. Мы можем ввести еще один поведенческий уровень (питание) при добавлении некоторых компонентов (две солнечные батареи и два управляющих диода) и дополнительной схемы компаратора. Второй компаратор будет отключать двигатель при достаточно высоком уровне внешней освещенности, включая режим зарядки элементов АА от солнечной батареи. В этом случае в качестве элементов АА должны быть использованы NiCd аккумуляторы.
На рис. 12.9 показана схема поведения робота. Когда уровень освещенности низок, то робот выключен, или мы можем сказать, что он находится в состоянии «отдыха». По мере нарастания уровня освещенности, она достигает точки, когда двигатель включается, и робот переходит в режим «поиск». При дальнейшем значительном возрастании уровня освещенности, при каком-то значении второй компаратор выключит двигатель, и NiCd аккумуляторы будут заряжаться от солнечной батареи, обеспечивая режим «питания».
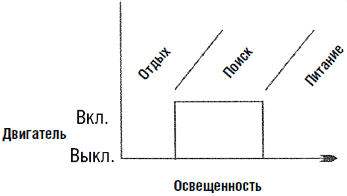
Рис. 12.9. Организация поведения по «уровням»
Если вы решите построить такую систему «питания», то необходимо проследить, чтобы ток, потребляемый схемой компараторов, не превышал ток, вырабатываемый солнечной батареей. В противном случае зарядка NiCd аккумуляторов окажется невозможной.
Дата добавления: 2015-08-17; просмотров: 58 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Работа схемы | | | Глава 13 Подводные роботы |