|
Читайте также: |
§ 4. ВОСПРИНИМАЮЩИЕ ЭЛЕМЕНТЫ ПЕРЕМЕЩЕНИЙ
Измерительные устройства в системах управления служат для восприятия первичной информации о состоянии объекта и преобразования ее в сигналы, удобные для дальнейшей переработки в сигналы управления.
 Измерительные устройства часто представляют собой сложную информационную систему, содержащую воспринимающие элементы, преобразователи, анализаторы, вычислительные устройства для первичной переработки информации (см. рис. 2).
Измерительные устройства часто представляют собой сложную информационную систему, содержащую воспринимающие элементы, преобразователи, анализаторы, вычислительные устройства для первичной переработки информации (см. рис. 2).
| Рис. 7. Статические характеристики: а — непрерывная; б — дискретная |
Основные требования к измерительному устройству — точность и формирование полезного сигнала с минимальными искажениями. Это зависит от ста-.тических и динамических характеристик и от влияния различных помех.
Необходимо помнить, что точность управления не может быть выше точности измерения.
При выборе измерительных устройств необходимы следующие данные: диапазон регулируемого параметра, требуемые точность измерения, статическая и динамическая характеристики, разрешающая способность, помехоустойчивость, мощность на выходе измерительного устройства.
Воспринимающие (измерительные) устройства. Эти устройства характеризует определенная функциональная связь между изменением измеряемой величины на входе и изменением выходного
сигнала. Зависимость у = f (х) называется статической характеристикой измерительного устройства, которая может быть непрерывной (рис. 7, а) или дискретной (рис. 7, б).

Рис. 8. Датчики перемещений:
a — варианты конечных выключателей; б — варианты контактных измерительных датчиков; в — бесконтактный конечный выключатель БВК-24
Для обеспечения постоянной чувствительности статическая характеристика у = f (х) измерительного устройства должна быть линейной или близкой к линейной на заданном интервале изменения х. Чувствительность — это отношение изменения выходной величины к соответствующему изменению измеряемой величины S = у/х; S = dy/dx. Порог чувствительности — наименьшее изменение измеряемой величины, способное вызвать появление изменения выходного сигнала.
Для сложных измерительных устройств чувствительность определяется: при последовательном соединении Sn = S1 S2... Sn =
=  Si, при параллельном соединении
Si, при параллельном соединении

Преобразование линейных и угловых перемещений применяют для согласования устройств, различающихся по виду энергии на
выходе и входе. Преобразователь линейных или угловых перемещений наряду с преобразованием сигналов может непосредственно выполнять функции соответствующего измерительного устройства.
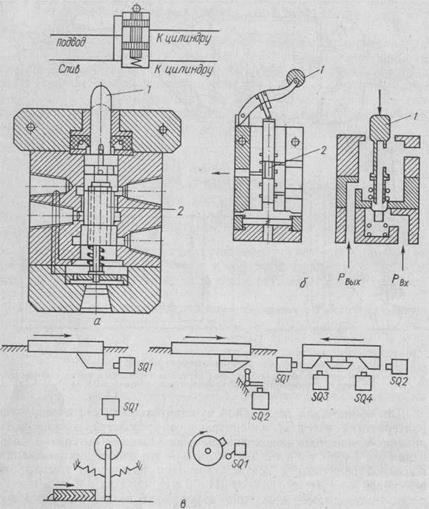
Рис. 9. Гидравлические (a), пневматические (б) датчики перемещений и схема монтажа конечных выключателей (в)
Электроконтактные преобразователи. В таких преобразователях замыкание электрических контактов происходит в момент достижения изменяющейся линейной величиной (перемещением) определенного значения. Эти преобразователи делят на две группы: командные и измерительные датчики перемещений.
Командные датчики перемещений, ограничения хода узла станка объединяют группу конечных выключателей контакт-
ных типа ВК, МП и др. (рис. 8, а, б) и бесконтактных типа БВК (рис. 8, в). Пневматические и гидравлические командные датчики представлены на рис. 9.
Способы монтажа командных датчиков показаны на рис. 9, в. Воздействие на нажимные выключатели происходит при помощи подвижных упоров, кулачков и т. д. Часто командные датчики используют как командоаппараты.
Измерительные датчики перемещений предназначены для измерения линейных размеров деталей или величины перемещения рабочих органов. При сравнении с одним предельным размером используют одноконтактные, при сравнении с двумя предельными размерами — двухконтактные и многоконтактные датчики.
Двухконтактные и многоконтактные преобразователи линейных перемещений широко применяют в автоматических устройствах активного контроля и контрольно-сортировочных автоматах для сортировки деталей по размерам на три и более групп.
Электроконтактный преобразователь (общий случай) состоит из измерительного стержня 1, воспринимающего регулируемое перемещение, механизма преобразования и электрических контактных пар 2 (см. рис. 8, 9).
Гидравлические датчики. Гидравлические датчики пути и положения представляют собой управляющий гидрораспределитель поршневого или кранового типа (рис. 9, а). Движущиеся рабочие органы станка, на которых расположены кулачки или упоры, достигнув положения, где установлен датчик, воздействуют на шток 1, вызывая его срабатывание. При этом перемещается поршень 2 или поворачивается кран. Схема гидросоединений при этом изменяется. Управление гидравлическими устройствами наряду с механическим может быть электромагнитным.
Пневматические датчики. Пневматические датчики аналогичны гидравлическим и выполнены в виде пневмораспределителей поршневого или кранового типа или с мембраной и клапаном (см. рис. 9, б). Эти устройства служат для контроля размеров и качества обработки поверхности изделий из древесины. Воздействие на рычаг / вызывает перемещение поршня 2.
Реостатные и потенциометрические преобразователи (датчики).
Потенциометрические преобразователи (потенциометры) представ
ляют собой переменные электрические сопротивления, величина
которых зависит от положения токосъемного контакта. Они на
ходят применение при измерении линейных и угловых перемеще
ний (рис. 10).

|
| Для прямолинейного перемещения движка система уравнений (рис. 10, а) будет: |

|
Чувствительность датчика (рис. 10, б) угловых перемещений определяется выражением


|

|
где Uo — напряжение питания; Ro — полное сопротивление потенциометра; R1, R2 — сопротивления частей, делимых движком; i1, i2, iн —токи в сопротивлениях R1, R2 и сопротивлении нагрузки RH; L — длина потенциометра; х — измеряемое перемещение.

|

|

|
Решив уравнения относительно напряжения нагрузки UH, получим:
Рис. 10. Потенциометрические преобразователи
Зависимость UH = f (R1) или UH = f (х) нелинейная (рис. 10, в), следовательно, для получения линейной зависимости требуется, чтобы RH  R0. тогда:
R0. тогда:

Чувствительность потенциометрического преобразователя будет:

Потенциометрические датчики могут изготовляться с нелинейной характеристикой UH = f (R1) = f (x) за счет намотки потенциометра на фигурный или ступенчатый каркас или переменного шага намотки.
Индуктивные преобразователи (датчики). Принцип их действия основан на изменении индуктивного сопротивления катушки при перемещении ферромагнитного якоря.
Индуктивные датчики используют для преобразования линейных и угловых перемещений в электрический сигнал. Они часто применяются как преобразователи при измерении размеров деталей, давления, расходов сред и т. п. Схемы простейших датчиков представлены на рис. 11. Входной величиной датчика является ширина воздушного зазора  (м), выходной — ток i (А) при заданном напряжении питания UП (В). Ток в цепи обмотки датчика
(м), выходной — ток i (А) при заданном напряжении питания UП (В). Ток в цепи обмотки датчика

Индуктивность может быть определена приближенно по формуле
Тогда
Рис. 11. Индуктивные преобразователи: а — индуктивный датчик; б — дифференциальный датчик
где S — сечение магнитопровода, м2; f — частота тока в питающей сети, Гц;  0 = 1,26
0 = 1,26  10-6 Гн/м — магнитная проницаемость воздуха; Z — полное сопротивление.
10-6 Гн/м — магнитная проницаемость воздуха; Z — полное сопротивление.
Таким образом, i = f (). Датчики работают при частоте питающей сети от 50 до 5000 Гц.
Для определения размеров применяют индуктивный дифференциальный датчик (рис. 11, б). Он имеет две катушки 2 и 4, включенные по дифференциальной схеме. Подвижный сердечник 3 соединен с измерительным штоком /. При 1= 2 параметры катушек одинаковы и I1  I2, U=U1 — U2= 0. Если измерительный шток изменит положение ( 1 2)!, то I1> I2 или I1< I2, и на выходе U 0. Сигнал будет пропорционален перемещению сердечника, и знак определится направлением перемещения сердеч-
I2, U=U1 — U2= 0. Если измерительный шток изменит положение ( 1 2)!, то I1> I2 или I1< I2, и на выходе U 0. Сигнал будет пропорционален перемещению сердечника, и знак определится направлением перемещения сердеч-
ника от среднего положения. Дифференциальные датчики отличаются лучшей чувствительностью и значительно меньшей погрешностью в результате колебаний температуры и напряжения питания.
Электроконтактные конечные выключатели в схемах автоматики стали заменять бесконтактными индуктивными конечными выключателями типа БВК (см. рис. 8, в) с двумя сердечниками. На одном расположены обмотка W к и обмотка положительной обратной связи Wn. с. Обмотки обратных связей включены встречно.
При прохождении алюминиевого экрана Э, который жестко закреплен на подвижном органе станка, в зазоре между обмотками
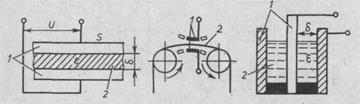
Рис. 12. Варианты емкостных преобразователей:
1 — обкладки конденсатора; 2 — среда
WK и Wo .с связь ослабевает и возникает генерация. В контуре WK. — СЗ появляется переменный ток, который индуцирует ЭДС в катушке Wn. c. В цепи базы транзистора происходит детектирование переменной составляющей тока базы. Транзистор открывается, вызывая срабатывание реле К.
Емкостные преобразователи, (рис. 12). Они преобразуют линейные или угловые перемещения в изменение емкости конденсатора. При частоте 50 Гц емкостные преобразователи имеют низкую чувствительность и требуют усилительных устройств. Если частота питающего напряжения более 1000 Гц, они обладают достаточной чувствительностью.
Область применения этих датчиков не ограничена измерением линейных перемещений и их используют для контроля уровня или влажности материалов. Изменение емкости в этих случаях происходит за счет изменения диэлектрических свойств среды.
Для плоского конденсатора емкость определяется как

где  — диэлектрическая проницаемость, Ф/м; S — площадь перекрытия пластин, см2; — расстояние между пластинами, см.
— диэлектрическая проницаемость, Ф/м; S — площадь перекрытия пластин, см2; — расстояние между пластинами, см.
Емкостные датчики требуют повышенной частоты питания.
Фотоэлектрические датчики. Фотоэлектрические датчики получили широкое распространение в быстродействующих входных устройствах цифровых вычислительных машин, автоматических приборах фотоконтроля с целью учета продукции, измерения длин,
освещенности, защиты рук, например при работе на прессах, при фотокопировании, а также в различных приборах оптики. Виды фотоэлектрических датчиков (фотоэлементов) даны на рис. 13.
В фотоэлементах с внешним фотоэффектом под воздействием света освободившиеся электроны с катода / направляются к аноду 2. В замкнутой цепи возникает электрический ток. К этой

Рис. 13. Фотоэлектрические датчики:
а — фотоэлементы с внешним фотоэффектом; б — фотоэлементы с внутренним фотоэффектом; в — фотоэлементы с запирающим слоем; г, д, е, ж — варианты применения фотоэлементов в качестве датчиков
группе относятся вакуумные и газонаполненные фотоэлементы (рис. 13, а). В фотоэлементах с внутренним фотоэффектом освободившиеся электроны остаются в веществе, повышая его электропроводность. Эти фотоэлементы называют фотосопротивлениями (рис. 13, б). В фотоэлементах с запирающим изоляционным слоем под действием света освободившиеся электроны из слоя 1, освещенного вещества переходят в слой 2, неосвещенного вещества (рис. 13, б).
На рис. 13, г фототок возникает в результате преобразования температуры нагретого тела / в световой поток 2 (фотоэлектрические пирометры). На рис. 13, д световой поток 2 проходит к фотоэлементу 4 через среду 3, которой частично поглощается. Это явление используется в фотоэлектрических приборах для определения прозрачности жидкости или газов. На рис. 13, е световой поток 2 от постоянного источника света 5 падает на поверхность 6, частично поглощается, а отразившаяся часть потока 7 поступает
на фотоэлемент 4. Этот принцип применяют для контроля состояния поверхности. На рис. 13, ж световой поток 2 пересекается движущимся предметом 8, полностью или частично экранируя его. Фотоэлемент 4 используют для счета изделий, контроля линейных размеров, защиты рук работающего на станке.
§ 5. ДАТЧИКИ УСИЛИЙ
Датчики усилий и давлений (рис. 14) формируют управляющие сигналы в зависимости от сил, создаваемых в рабочих органах. Характерным электромеханическим датчиком можно считать кулачковую муфту 1 со скошенными зубьями (см. рис. 14,а). Одна из полумуфт размещается на валу со скользящей шпонкой

Рис. 14. Датчики усилий:
а — электромеханический; б — реле давления; в — сливной клапан; г — тензометриче- ский преобразователь; д — схема наклейки и включения тензометрического преобразо-
Вателя
и прижимается ко второй половине пружиной 3. Если на валу возникают силы, превышающие предельные, муфта сдвигается и че-pез рычаг 2 воздействует на конечный выключатель SQ, вызывая eго срабатывание. Сигнал поступает в схему управления.
Реле давления (см. рис. 14, б) контролирует изменение нагрузки в рабочих органах станка по изменению давления непосредственно в гидросистеме. Выполняется с электроконтактным выходом или в виде сливного клапана (см. рис. 14, в). Повышение давления в полости А вызывает прогиб мембраны 9, рычаг 2, сжимая пружину 3, поворачивается и нажимает на шток конечного выключателя 5, вызывая его срабатывание. Регулировка силы срабатывания выполняется винтом 4.
Тензометрические преобразователи представляют собой безынерционные устройства, которые используют для преобразования малых деформаций (порядка сотых и тысячных долей миллиметра) в электрический сигнал. Тензопреобразо-ватель изготавливают из константановой проволоки диаметром 0,02—0,05 мм. Проволоку 6 приклеивают змейкой на полоску тонкой бумаги 7 и сверху наклеивают второй слой бумаги (см. рис. 14, г). Тензоэлемент приклеивают к поверхности деформируемой детали 8 таким образом, чтобы прямолинейные участки проволоки растягивались или сжимались в соответствии с деформацией элемента (см. схему на рис. 14, д).
§ 6. ДАТЧИКИ ЧАСТОТЫ ВРАЩЕНИЯ
Тахогенераторы как датчики позволяют сформировать управляющие сигналы в функции скорости. Они применяются для измерения частоты вращения и относятся к группе электрических

Рис. 15. Датчики частоты вращения:
а — тахогенератор постоянного тока; б — тахогенератор переменного тока; в — реле
контроля скорости
генераторов. Тахогенераторы постоянного тока могут иметь обмотки возбуждения или постоянные магниты (рис. 15, а). При вращении напряжение на зажимах якоря пропорционально частоте вращения вала якоря Е = UЯКеФ  Учитывая, что магнитный
Учитывая, что магнитный
поток Ф= const, можно записать UTГ = UЯ = ФКе . Обозна
чим КеФ = КTГ. Тогда UTГ = КTГ .
Тахогенераторы переменного тока изготавливают синхронными и асинхронными. Наиболее широкое применение получили асинхронные тахогенераторы (рис. 15, б). Они имеют обмотку возбуждения ОВ и выходную обмотку W. ЭДС тахогенератора пропорциональна частоте вращения Е = KUb .
Реле контроля скорости (рис. 15, в) состоит из постоянного магнита 3, находящегося на валу. Кольцо с коротко-замкнутой обмоткой 4 расположено на другом валу, связанном с толкателем 1, который воздействует на контактные группы К1, К2. Вал с толкателем и короткозамкнутой обмоткой возвращается в исходное положение под действием пружины 2. При вращении вала с магнитом в короткозамкнутой обмотке наводится ЭДС ЕКЗ и протекает ток IКЗ, взаимодействующий с магнитным полем магнита. Создается вращающий момент, под действием которого кольцо с толкателем поворачивается, толкатель воздействует на контакты К1 и К2, вызывая их срабатывание.
§ 7. ДАТЧИКИ УГЛОВ ПОВОРОТА
Сельсины по конструкции аналогичны электрическим машинам переменного тока и делятся на контактные и бесконтактные. Функции первичной цепи (входа) выполняет однофазная обмотка

Рис. 16. Схемы соединения сельсинов: индикаторная (а) и трансформаторная (б).
возбуждения, которая может располагаться как на статоре, так и на роторе. Вторичные трехфазные обмотки размещены в пазах ротора или статора со сдвигом магнитных осей на 120°. Сельсины применяются в двух основных вариантах схем: индикаторной и трансформаторной (рис. 16).
Индикаторная схема состоит из двух сельсинов: сельсина-датчика и сельсина-приемника. Одноименные обмотки ротора и статора соединены между собой электрически. Входные обмотки подсоединены к сети (рис. 16, а). Если ротор сельсина-датчика повернется на некоторый угол  , по соединительным проводам ро-
, по соединительным проводам ро-
тора потечет ток, и ротор сельсина-приемника под действием возникшего вращающего синхронизирующего момента Мсин повернется на угол  .
.
М син = М max sin
где = —  ; М max—максимальный момент, развиваемый сельсином. Для малых углов М син = М max .
; М max—максимальный момент, развиваемый сельсином. Для малых углов М син = М max .
Трансформаторная схема (рис. 16, б) предполагает, что переменное напряжение питания подводится только к ротору сельсина-датчика. Ротор сельсина-приемника затормаживается или связывается с исполнительным механизмом, В этом случае при повороте эотора сельсина-датчика на некоторый угол на выходе однофазной эбмотки сельсина-приемника возникает переменное напряжение

Сельсины получили широкое применение в следящих системах
для синхронизации вращения валов, в дистанционных передачах
при автоматическом контроле диаметров, уровней, углов пово-
pота и т. д.), а также как преобразующие элементы при передаче
юказаний приборов на расстояние.
Для оценки углов поворота могут применяться потенциометри-ческие (см. рис. 10) и индуктивные (см. рис. 11) датчики.
§ 8. ВОСПРИНИМАЮЩИЕ ЭЛЕМЕНТЫ ТЕМПЕРАТУР
Разнообразие условий эксплуатации и широкий диапазон измеряемых температур обусловливают применение различных методов измерения и воспринимающих элементов, использующих физические явления, происходящие в веществах под действием температур: тепловое расширение, изменение электрической проводимости, возникновение термоэлектродвижущей силы, лучеиспускание нагретых тел и т. д.
Наиболее распространены контактные методы измерения температур при непосредственном контакте со средой.
Использование теплового расширения твердых тел, жидкостей или газов составляет основу дилатометрических, биметаллических и манометрических чувствительных элементов для измерения температур (рис. 17, а —е).
Ртутный термометр (см. рис. 17, а) основан на эффекте расширения тел под действием температуры. Применяется для измерения температур до 750 °С и низких — до — 100 °С. Жидкостные термометры являются местными приборами». Для дистанционной сигнализации могут применяться ртутные контактные термометры, состоящие из ртутного столбика 1 и контактов 2.
Дилатометр (см. рис. 17, б) состоит из трубки 1 и стержня 2 с различными коэффициентами линейного расширения. Свободный конец стержня по отношению к трубке перемещается в зависимости от температуры  на величину
на величину  h = Kи , где Kи = = l ( 1- 2) — коэффициент передачи дилатометра.
h = Kи , где Kи = = l ( 1- 2) — коэффициент передачи дилатометра.
Биметаллический термометр (см. рис. 17, в) представляет собой две спаянные металлические пластинки 1, 2 с различным коэффициентом расширения, которые, изгибаясь, перемещаются на величину h и замыкают контакты 3. Чувствительные элементы используются как тепловые реле.

|

|
Манометрический термометр (см. рис. 17, г) основан на использовании закона Клайперона
Рис. 17. Воспринимающие элементы температуры:
а — ртутный термометр; б — дилатометр; е — биметаллический термометр; г — манометрический термометр; д — термометр сопротивления; е — термоэлектрический термометр; ж — характеристики термометров сопротивления; з — специальная мостовая схема
компенсации
где Р — давление газа; V — объем герметизированной системы; т — масса газа; — молекулярный вес; R — универсальная газовая постоянная; Т — температура. Изменение температуры вызывает изменение давления в герметизированной системе 1, что приводит к перемещению чувствительного элемента 2.
Термометры сопротивления (см. рис. 17, д) основаны на зависимости электрического сопротивления проводников Rt = Ro (1 + t °), и полупроводников Rt = A е  / t ° от температуры среды (рис. 17, ж). Термометр сопротивления состоит из проволоки 1 и каркаса 2. В СССР серийно выпускают платиновые термометры сопротивления (ТСП) с условной градуировкой 20, 21, 22 для температур от — 200 ° до + 650 °С, медные термометры сопротивления (ТСМ) с условной градуировкой 23, 24 для температур от — 50° до + 180 °С. Полупроводниковые термосопротивления изготавливают типов ММТ, КМТ.
/ t ° от температуры среды (рис. 17, ж). Термометр сопротивления состоит из проволоки 1 и каркаса 2. В СССР серийно выпускают платиновые термометры сопротивления (ТСП) с условной градуировкой 20, 21, 22 для температур от — 200 ° до + 650 °С, медные термометры сопротивления (ТСМ) с условной градуировкой 23, 24 для температур от — 50° до + 180 °С. Полупроводниковые термосопротивления изготавливают типов ММТ, КМТ.
Термоэлектрический термометр (термопары) (рис. 17, е). Принцип действия этого термометра основан на термоэлектрическом эффекте, когда в замкнутой цепи, состоящей из двух или нескольких разнородных металлов, возникает электрический ток, если хотя бы два места соединения (спая 1, 2) проводников имеют разную температуру. 
=KTt02C.
В СССР изготавливают и применяют термопары: платинородий-платина (ТПП) при температурах до 1600 °С; платинородий (30 % родия)-платинородий (6 % родия) (ТПР) — до 1800 °С; хромель-алюмель (ТХА) — до 1000 °С; сплав НК-СА (ТНС) — до 1000 °С; хромель-копель (ТХК)—до 600 °С.
Из нестандартных термопар достаточно широко применяют термопары медь—константан, железо — константан, медь—копель, железо—копель.
Термопары соединяются с измерительным прибором (милливольтметром, потенциометром) специальными компенсационными проводами, дающими в паре те же величины ЭДС.
Для стабилизации температуры холодных спаев применяют термостаты или вводят поправки на колебания температуры холодного спая с использованием специальных мостовых схем (см. рис. 17, з).
Пирометры излучения основаны на использовании теплового излучения нагретых тел. Это обеспечивает бесконтактность измерения с применением фотоэлектрических преобразователей. При изменении температуры нагретого тела изменяются его цвет и соответственно интенсивность (яркость) монохроматического (одноцветного) излучения, а также суммарное (интегральное) излучение (радиация). Эти два свойства используются для измерения температуры тел.
§ 9. ВОСПРИНИМАЮЩИЕ ЭЛЕМЕНТЫ ДАВЛЕНИЯ
Давление вызывают движущиеся молекулы газа или жидкости. Давление — число единиц силы, действующей на единицу площади.
В системе СИ за единицу давления, называемую «Паскаль» (Па), принято давление, которое оказывает сила в 1 Н, действующая на поверхность в 1 м2.
В технике часто применяют «внесистемные» единицы, такие,
как техническая атмосфера (кгс/см2), миллиметры ртутного столба,
определяемые при температуре в градусах Цельсия и нормальном
ускорении и др.
При измерении различают абсолютное, избыточное давление и вакуум. Абсолютное давление (Ра) отсч.итывается от абсолютного нуля (абсолютное разрежение), избыточное (Ри) — от атмосферного давления (Рат). Вакуум измеряют аналогично.

Устройства, предназначенные для измерения давления, можно разделить на две группы.
Устройства с упругими воспринимающими элементами1
(рис. 18, а — г). Измерение давления производится упругими воспринимающими элементами (рис. 18), к которым относят: мембраны (см. рис. 18, а), сильфоны (см. рис. 18, б), трубчатые или геликоидальные пружины (см. рис. 18, в, г).

Нис. 18. Воспринимающие элементы давления:
а — мембраны; б — сильфоны; в — трубчатые пружины; г — геликоидальные пружины;
д — пьезодатчик; е — магнитно-стрикционный датчик
Перемещение центра мембраны или свободного сильфона, а также угол раскручивания свободного конца трубчатой пружины зависят от изменения давления АР, что можно выразить уравнением h = КU Р, где КU — коэффициент усиления мембраны или сильфона или трубчатой пружины.
Деформация упругих элементов преобразуется в измерительный сигнал с помощью преобразователя (емкостного, тензометриче-ского, индуктивного, реостатного и др.).
Устройства с воспринимающими элементами, изменяющими физические свойства под действием давления (рис. 18, д, е). К ним относят устройства, преобразователи которых имеют принцип действия: пьезоэлектрический, магнитно-стрикционный, ионизационный и др.
В данной группе устройств давление может непосредственно воздействовать на воспринимающий элемент, изменяя его свойства. Большинство устройств имеют мембраны, опирающиеся на чувствительный элемент (см. рис. 18, д). Давление от мембраны 1 передается с помощью стержня 2 на два измерительных пьезоэлемента 4.
Одновременно стержень 2 опирается на модулирующий пьезоэле-мент 3. Электроды пьезоэлемента подсоединены к сети переменного тока 220 В при частоте 50 Гц. Выход устройства подсоединяется к прибору. При действии переменного напряжения пьезоэлемент 3 подвергается деформации растяжения и сжатия, под действием усилия, оказываемого мембраной / на измерительные пьезоэле-менты 4.
На рис. 18, е представлена схема компенсационного устройства с магнитно-стрикционным преобразователем. Сердечник 1 является чувствительным элементом, выполненным из никель-цинкового феррита. Мембрана 2 передает давление сердечнику, у которого меняется магнитная проницаемость, а следовательно, и ЭДС Е1. Сердечник 4 и обмотки 3 создают компенсационную ЭДС Е2- Схема включения дифференциальная. Напряжение Uвых = f (E2 — E1, но Е2—Е1 = f ( Р), тогда Uвых = f ( Р).
Дата добавления: 2015-07-25; просмотров: 137 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| И СИСТЕМ УПРАВЛЕНИЯ | | | ВОСПРИНИМАЮЩИЕ ЭЛЕМЕНТЫ РАСХОДА И УРОВНЯ |