Читайте также:
|
Кінематичне дослідження плоских механізмів включає такі основні задачі:
1. Визначення положень ланок, траєкторій точок механізму.
2. Визначення величини та напряму лінійних швидкостей та прискорень точок, кутових швидкостей та прискорень ланок механізму.
Побудова плану положень ланок
Побудова плану положень механізму виконується графічно методом засічок.
Нехай треба визначити положення ланок та траєкторії точок механізму, кінематична схема якого зображена на рис. 1.2. Розміри ланок та закон руху ведучої ланки ОА задано.
lOA=0,3 м; lAB=0,8; lBC=0,65м; lBD=0,23м; lOE=y=1,1 м
lEC=х=0,09 м; j1=0°; j2=90°; w1=20 c-1
Центри ваги ланок знаходяться на серединах ланок.
Так як ланка ОА обертається з постійною кутовою швидкістю навколо точки О, то траєкторією точки А є коло радіусом ОА (рис. 1.4).
Із точки О проводимо коло радіусом 30 мм, тоді масштабний коефіцієнт довжини:
ml = lОА/ОА=0,3 м /30 мм =0,01 м/мм
Поділимо коло на 12 однакових частин. Позначимо положення кривошипа ОА в напрямі обертання його А1, А2, А3 і т.д.
По заданим розмірам ланок у масштабі ml знаходимо положення нерухомих точок механізму О і С. З точки С проводимо дугу радіусом СВ.
СВ= lCВ/ μl= 0,65 м/0,01 м/мм=65 мм.
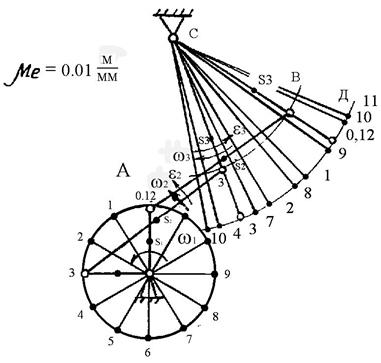
Рис.1.4.
Послідовно, із кожної точки А (А1, А2, A3 і т.д.) дугою АВ робимо на цій дузі засічки. Так знаходимо 12 положень точки В.
АВ=lав/μl =0,8 м/0,01 м/мм =80 мм.
Послідовно з'єднуємо точки А і В, В і С. Одержуємо 12 положень механізму. З точки С проводимо дугу СД і одержуємо траєкторію руху точки Д.
СД = (lCB+lBD)/μl= (0,65 м+0,23 м)/0,01 м/мм = 88 мм.
Центри ваги ланок знаходяться на серединах ланок.
3.2. Кінематичне дослідження механізмів за допомогою планів швидкостей та прискорень
Метод планів має ряд переваг: простота, наочність, можливість визначення лінійних швидкостей та прискорень точок, кутових швидкостей і прискорень ланок механізму в даному його положенні.
Побудова планів швидкостей і прискорень починається з ведучої ланки, закон руху якої задано. Потім послідовно розглядають групи Ассура в порядку їх з'єднання з початковим механізмом.
Будуємо план швидкостей для положення механізму φ2=90° (рис. 1.5).
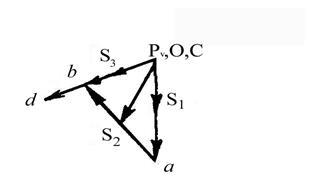
Рис. 1.5
Кутова швидкість ведучої ланки ОА
ω1=20× с-1=20 рад/с
Величина швидкості точки А ведучої ланки механізму:
Vа= ω1·lOA=20·0,3=6 м/с
Вектор швидкості точки А спрямований перпендикулярно ланці ОА в напрямку її обертання.
Із точки pv – полюса плану швидкостей – проводимо вектор  мм, що зображає швидкість точки А в масштабі:
мм, що зображає швидкість точки А в масштабі:
 .
.
Вектор  проводимо перпендикулярно ланці ОА в напрямку обертання.
проводимо перпендикулярно ланці ОА в напрямку обертання.
Для групи 2-3 складаємо систему векторних рівнянь.
 .
.
Швидкість точки А відома за значенням і напрямом. Відносна швидкість  відома за напрямом – вона перпендикулярна ланці АВ, але невідома за величиною. Швидкість точки С=0,
відома за напрямом – вона перпендикулярна ланці АВ, але невідома за величиною. Швидкість точки С=0, 
 , тобто вона знаходиться у полюсі pv. Відносна швидкість
, тобто вона знаходиться у полюсі pv. Відносна швидкість  перпендикулярна ланці ВС, але невідома за величиною.
перпендикулярна ланці ВС, але невідома за величиною.
З кінця вектора на плані швидкостей проводимо лінію, перпендикулярну ланці АВ, а з полюса рv – лінію, перпендикулярну ланці ВС. Точку перетину цих ліній позначимо b. Вектор  зображає на плані швидкостей абсолютну швидкість точки В; ії модуль дорівнює:
зображає на плані швидкостей абсолютну швидкість точки В; ії модуль дорівнює:
VВ=рvb×μv=20×0,2=4 [м/с].
Відносна швидкість зображена на плані швидкостей відрізком  і ії модуль дорівнює:
і ії модуль дорівнює:
Vва=bа× μv=29× 0,2=5,8 [м/с].
Для знаходження швидкості точки Д скористаємося теоремою подібності фігур, які утворюють вектори відносних швидкостей і фігури на плані механізму.
Фігура відносних швидкостей на плані швидкостей подібна фігурі на плані механізму, але повернена відносно останньої на 90° у напрямі кутової швидкості фігури механізму.
 [мм].
[мм].
Відклавши на продовженні відрізка  () відрізок bd =7мм, одержимо точку d. Модуль абсолютної швидкості точки Д визначаємо за формулою:
() відрізок bd =7мм, одержимо точку d. Модуль абсолютної швидкості точки Д визначаємо за формулою:
VДВ= рvd×mv=7×0,2=1,4 [м/с].
Швидкості центрів ваги знаходимо теж за теоремою подібності:
 [м/с];
[м/с];
 [м/с];
[м/с];
 [м/с].
[м/с].
Кутова швидкість ланки ОА відома w1 =20 с-1, має напрям проти руху годинникової стрілки. Кутова швидкість ланки АВ визначаємо за формулою:
 с-1.
с-1.
Для знаходження напряму руху кутової швидкості ω2 перенесемо уявно відрізок ( ), що зображує
), що зображує  у точку В механізму. Він показує в якому напрямку обертається точка В і всі інші точки ланки АВ навколо точки А. Швидкість ω2 має напрям проти руху годинникової стрілки.
у точку В механізму. Він показує в якому напрямку обертається точка В і всі інші точки ланки АВ навколо точки А. Швидкість ω2 має напрям проти руху годинникової стрілки.
Кутова швидкість ланки СД:
 с-1
с-1
і має напрям по годинниковій стрілці. Для визначення ω3 перенесемо уявно відрізок ( ), що зображає
), що зображає  , у точку В механізму. Він показує, у якому напрямку обертається точка В і всі інші точки ланки ВС навколо точки С.
, у точку В механізму. Він показує, у якому напрямку обертається точка В і всі інші точки ланки ВС навколо точки С.
Побудова плану прискорень здійснюється в тій же послідовності, що і план швидкостей:
`аА = аО+ аАО; `аО=0, то `аА =`аАО
 .
.
Оскільки ланка АО рухається рівномірно (` VA = const), то ` аtAO =0. Тоді:
 [м/с2].
[м/с2].
Вектор  має напрям уздовж ланки ОА від точки А до точки О, тобто до центру обертання (рис. 1.6).
має напрям уздовж ланки ОА від точки А до точки О, тобто до центру обертання (рис. 1.6).
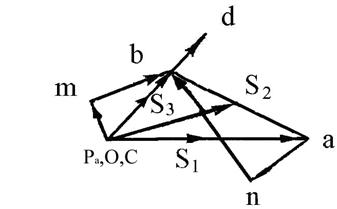
Рис. 1.6
З точки ра – полюса плану прискорень – проводимо відрізок довільної довжини ( мм), що зображає вектор прискорення ` аА в масштабі:
мм), що зображає вектор прискорення ` аА в масштабі:
 .
.
Відрізок  проводимо паралельно ОА у напрямі від точки А до точки О.
проводимо паралельно ОА у напрямі від точки А до точки О.
Для групи 2-3 складаємо векторну систему рівнянь:
 .
.
Прискорення точки А відоме за модулем, значенням і напрямом. Прискорення точки С дорівнює 0, тобто точка С знаходиться у полюсі. Прискорення ` аnва паралельне АB і спрямоване від точки В до точки А. Значення цього прискорення
 [м/с2].
[м/с2].
Прискорення ` аtВA перпендикулярне АB. Модуль цього прискорення поки що невідомий.
Прискорення ` аnBC паралельне ВС і спрямоване від точки В до точки С.
Модуль прискорення:
 [м/с2].
[м/с2].
Прискорення ` аtВC перпендикулярно ВС, модуль цього прискорення поки що невідомий. З кінця вектора  проводимо пряму, паралельну АB, у напрямі від точки В до точки А. На ній відкладаємо вектор
проводимо пряму, паралельну АB, у напрямі від точки В до точки А. На ній відкладаємо вектор  , що зображує прискорення `аnBA. Величина цього вектора:
, що зображує прискорення `аnBA. Величина цього вектора:
 [мм].
[мм].
З точки п проводимо пряму, перпендикулярну АВ, що зображує напрям ` аtBA.
З полюса ра, тобто з точки С, проводимо пряму, паралельну ВС у напрямі від точки В до точки С. На ній відкладаємо вектор  , що зображує прискорення `аnBС . Величина вектора:
, що зображує прискорення `аnBС . Величина вектора:
 [мм].
[мм].
З точки m проводимо пряму, перпендикулярну ВС, яка зображує напрям ` аtВС. Точку перетину цього перпендикуляра з перпендикуляром, проведеним з точки п, позначимо точкою b. З’єднаємо точку b з полюсом і точкою а.
Абсолютне прискорення точки В:
 [м/с2].
[м/с2].
Відносне прискорення:
 [м/с2].
[м/с2].
Для знаходження прискорень точки Д та центрів ваги, скористаємося теоремою подібності фігур, утворених векторами відносних прискорень і фігур на плані механізму:
Фігура відносних прискорень на плані прискорень подібна фігурі на плані механізму, але повернена відносно неї на 180° -a у напрямі кутового прискорення фігури. Кут a визначається з рівності:
 .
.

Відклавши на продовженні вектора  відрізок bd =8,8 мм, одержуємо точку d.
відрізок bd =8,8 мм, одержуємо точку d.
Модуль абсолютного прискорення точки Д:
 [м/с2].
[м/с2].
Модулі тангенціальних прискорень та прискорень центрів ваги:
 [м/с2];
[м/с2];
 [м/с2];
[м/с2];
 [м/с2];
[м/с2];
 [м/с2];
[м/с2];
 [м/с2].
[м/с2].
Кутове прискорення ланки ОА дорівнює 0. Кутове прискорення ланки АВ:
 [с-2].
[с-2].
Це прискорення спрямоване проти руху годинникової стрілки. Щоб визначити його напрям, переносимо уявно вектор ` аtBA (відрізок (mb)) у точку В механізму і розглядаємо рух цієї точки відносно точки А за напрямом прискорення ` аtBA:
 [с-2].
[с-2].
Прискорення ε3 має напрям проти годинникової стрілки.
Дата добавления: 2015-07-11; просмотров: 208 | Нарушение авторских прав