Читайте также:
|
1Параграф.
Наведение ла это управление его поступательным движ в пространстве исходя из заданной цели управление. Управление его перемещением. В основном ЛА предназначены для отправки груза из отднюй точки в другую. Это и есть цель наведение.
Надо управлять: силы тяги, аэродинамическими силами.
Рассмотрим типовую задачу:
Дано: 1) Урав-ние движения ЛА.
 =
=  (X1,X2,….,Xn; U1,U2….Un) I = 1,…n (1)
(X1,X2,….,Xn; U1,U2….Un) I = 1,…n (1)
2) Краевые условия уравнения



3) Показатель кол-ва управления

Критерий оптимальности управления.
 }
}


Пример мат. модели описывающий движение лет аппарата при наведении.
Особености парам. Програмного жесткого управления при наведении ЛА.
| ОБЪЕКТ УПРАВЛЕНИЯ |
| ЦЕЛЬ УПРАВЛЕНИЯ |
| Входная инфа U(t) X(t) |
| БЛОК РАСПРЕДЕЛЕНИЯ УПРВЛЕНИЯ ВОЗДЕЙСТВИЯ |
| НИС |
П.2 Особенности.
При изменения пуска ракет, нужно полностью пересчитать краевые условия если это сложные алгоритмы, то это может занять долгое время.
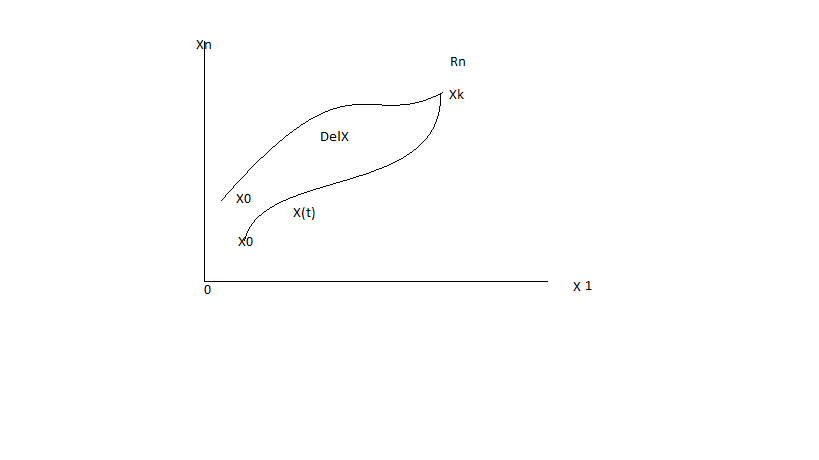
П.3 Терминальный метод управления.
Терминальный метод – (terminus – конечный) Управление конечным состоянием объекта. Xk – цель управления. Зависит от фактического состояния объекта.
 x(t)-терминальное состояние ОУ.
x(t)-терминальное состояние ОУ.
Иллюстрация характера управления при применения закона терминального управления.
| Цель управления |
| Объект управления |
| Блок распр. Управления |
| Входные паарметры X0 Xk |
| НИС |
Преимущества Термального.
Расчеты могут производится прямо в блоке находящимся на борту, дает гибкость управления.
Отпадает необходимость программной фазовой траектории. Упрощение проц подготовки данных
Повышение точности управления.
Пример применения программного метода наведения на отечественных ракетах баллистических и космических.
Основная управляющая сила это тяга двиг. Установки. Вектор определятся вектором и его 2умя углами.
P = 
Дата добавления: 2015-10-13; просмотров: 191 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Пункт 3. АЭРОДИНАМИЧЕСКИЕ СИЛЫ. | | | Диаграмма Ганта |