Читайте также:
|
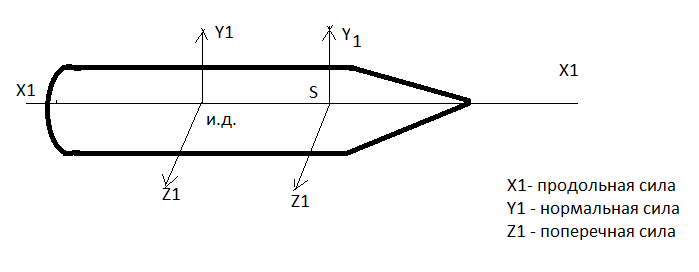
Возникают в атмосфере в результате взаимодействия воздушной среды и корпуса ЛА.
А). Полная аэродинамическая сила R – равнодействующая всех летательных сил, возникающих при взаимодействии с воздушной средой.
Сила нормального давления и сила трения.
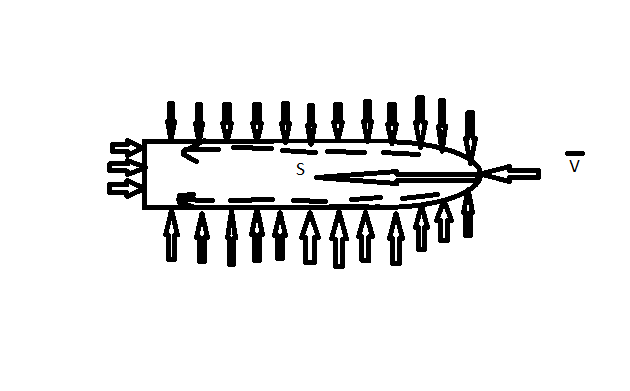

Для оси симметрических ЛА ось давления лежит на оси. (Он не обязан совпадать с центром масс)
Б) Связанная система координат.
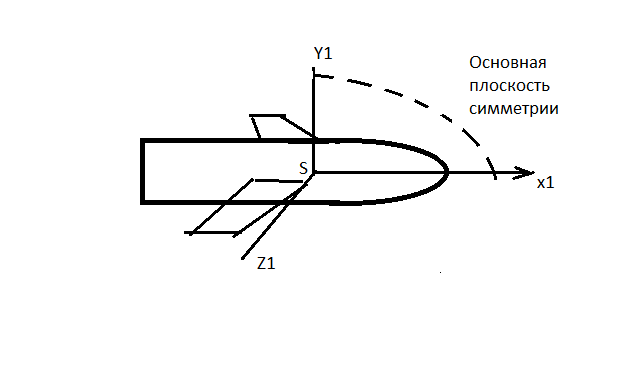
В)Скоростная (поточная) система координат: 
Г) Углы вз ориентации связанных и поточных осей координат:

Д) Рассмотрим проекции полной аэродинамической силы на оси поточная (скоростной) системы координат.
Q –сила лобового сопр (пр. R на ось Xv)
Y - подъемная сила
Z – боковая сила
| R |
| Yv |
| Y |
Они пропорциональны напору воздушного потока.

 (1)
(1)
Максимальная площадь поперечного сечения – площадь Миделевого сечения.
 (2)
(2)
 (3)
(3)
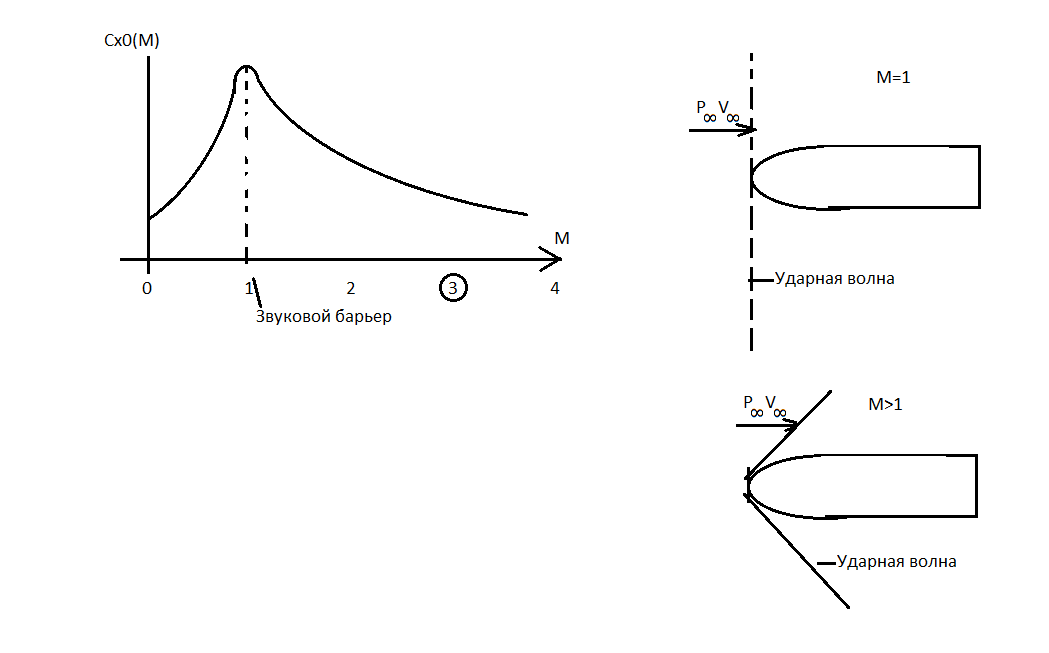
C – аэродинамические коэффициенты. Функционально зависимы.
M – отношение скорости ла к скорости звука в воздушной среде на данной высоте полета.





Для удобства расчета функциональные зависимости раскладывают в ряды Тейлора по углу атаки и скольжения в окрестностях.
| ~0 |
| ~0 |



| ~0 |
| ~0 |


| ~0 |


Параграф 4. Моменты, действующие на ЛА в полете.
1. Аэродинамические моменты (статический аэродинамический момент и демпфирующий момент).
2. Моменты, создаваемые органами управления ЛА (Моменты, создаваемые аэродинамическими органами управления – рули. Моменты, создаваемые газодинамическими органами управления).
П.1. Рассмотрим статический аэродинамический момент. Создается за счет действия полной аэродинамической силы и возникает в случае, когда центр давления не совпадает с центром масс ЛА.
В соответствии с правилами знаков, принятыми в механике, момент является положительным, если он приводит к вращению ЛА относительно соответствующей оси против часовой стрелки. Если рассматривать с конца. Если по часовой - то отрицательный.
Оси связанной системы координат.






Понятие Статическая устойчивость и статическая неустойчивость ЛА.
Ла статически устойчивы, если статические аэродинамические моменты отрицательны.
ЛА называется статическим
Большинство боевых ракет, баллистических – статически неустойчивы.
Самостабилизация невозможно. Устойчивый стабилизированный полет происходит только за счет органов управления.
ЛА называется статически нейтральным, если ld-ls =0.
Пункт 2.
Демпфирующий момент возникает в том случае, когда объект на ряду с поступательным, совершает вращающее движение с некоторой угловой скоростью.
Пункт 3. Моменты, созданные аэродинамическими органами управления.
Правило знаков: угол отклонения любого органа управления, полагается положительным, если при этом создается отрицательный управляющий момент, который приводит к вращению ЛА против часовой стрелки.
-_-
Момент, относительно оси z1.
При одном и том же отклонении органов управления б1 б2 б3 б4
Все рули участвуют в создании момента.
Суммарный момент
Моменты, создаваемые газодинамическими органами управления.
Четырехкамерные
Акселерометр
Кажущиеся параметры движения, которые характеризуют силы, без силы
Кажущееся - ускорение без учета ускорения гравитационного притяжения
Интегралы кажущегося ускорения - приращение кажущейся скорости.
2 интеграл – приращение кажущегося пути.
Эти параметры могут измеряться с помощью датчиков
Измеряться может только проекция кажущегося ускорения на ось чувствительности.
Для полного измерения – надо минимум три устройства.
Вопрос пункт 2.
Основное управление инерциальной навигации.
Всегда имеется система отсчета, система координат,
| Кажущееся ускорение-> |

Модель гравитационного поля.
По определению – основное уравнение инерциальной навигации
НУ: r(t)=r0; V(b0)=V0
Операторная форма записи решения уравнения навигации.

Каковы источники погрешности, которые мы допускаем при решении навигационной задачи:
1. Погрешности определения начальных условий:  ,
, 
2. Погрешности первичного навигационной информации. 
3. Погрешности модели графического поля 
4. Погрешности численного интегрирования уравнения навигации.
5. Свойство неустойчивости основного уравнения неинерциальной навигации.
Очень важный недостаток – время непрерывной работы инерционной навигационной системы ограничено даже при высокоточной модели высокогравиатционного поля. В следствие внутреннего неустойчивости.
Прибор ГСП позволяет решить две основные задачи навигации:
1. Обеспечить стабильное неизменное положение осей чувствительности акселерометра в абсолютном пространстве. При любых угловых эволюциях объекта навигации.
2. Сама ГСП позволяет достаточно просто производить измерения параметров угловой ориентации ЛА. А именно, в осях подвеса ГСП при угловых эволюциях ЛА мы можем фиксировать взаимное смещение рам подвеса и корпуса ЛА – это и будет информация непосредственно об угловом положении ЛА.
Наряду с этим находят широкое применение которые не используют ГСП.
Если у нас навигационная система включает ГСП, то первичная измерительная информация включает следующие данные:
1. Платформенные инерциальные Навигационные системы.
Безплатформенные инерциальные навигационные системы. (БИНС)
Применяются в малогабаритных ЛА (боевые ракеты различных типов, самолетные, противотанковые и т.п.)
6.12.2011
Радиотехнические навигационные системы используются главным образом навигационными точками.
Системы радионавигации:
1. Позиционные – положение относительно точки
2. Навигационные –
Определить условия однозначный разрешимости навигационной задачи.
Неизвестные величины могут быть определены однозначно, и наоборот. Исследование с помощью Якобиевых матриц – взаимно однозначно или нет наблюдаемость.
Дальномерные системы
Псевдодальность – это обычная дальность или расстояние между навигационной точкой и объектом навигации, но искаженная систематической погрешностью измерения.
Связана с тем, что шкала времени у потребителя может иметь смещения. Связано с тем, что у потребителя трудно обеспечить высокоточную привязку к единой шкале времени. Когда у навигационной есть синхронизация времени. Во всех приемниках трудно обеспечить высокочастотные привязки.
Чтобы задача была решена - надо, чтобы 4 радионавигацонные точки не лежали в одной плоскости.
5. Радиально-скоростные системы - измеряется радиальная скорость.
Измеряется


Требуется найти по синхр изм. 

6. Псевдорадиально-скоростные системы
 – постоянное смещениею.
– постоянное смещениею.



3.4 Спутниковые радионавигационные системы.
Глонасс – глобальная навигационная спутниковая система.
GPS – Глобальная позиционная система.
Точность функционирования
3-5 наносекунд это точность у потребителя на порядок хуже. Для этого приходится считать величину погрешности.
Бортовые нулевые эталоны частоты
F = 1.6 * 10^9
∆F = 1,6 * 10^9 * 10^-13 = 10^-4Гц
Современная точность прогнозирования
Вдоль орбиты 20м.
По нормали 5м
По бинормали 10м.
Инерциальные навигационные системы и спутниковые навигационные системы.
Дата добавления: 2015-10-13; просмотров: 220 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Параграф 1.2. Структура уравнений, описывающих движение или полет ЛА. | | | Системы наведения ЛА. |