Читайте также:
|
Цилиндрические прямозубые передачи
(П .Г Гузенков «Детали машин» §§12.2, 12.3
М.Н. Иванов «Детали машин» §8.2)
Во время передачи движения зацеплением зубьев важно выполнить ряд условий, предъявляемых к ним при производстве и эксплуатации передач.
1. Кинематическое условие – U = const
Профили зубьев передачи должны обеспечивать постоянство передаточного числа – U.
2. Энергетическое условие.
Для обеспечения высокого К.П.Д., прочности и долговечности колес, профили должны обеспечивать малые скорости скольжения – Vск и достаточные радиусы кривизны в пятнах контакта зубьев.
3. Технологическое условие (производственное).
Профили зубьев должны удовлетворять условию легкого изготовления, в частности нарезанию простым инструментом, независимо от числа зубьев колес.
Этим требованиям наиболее полно удовлетворяет эвольвентное зацепление.
Оно разработано Л. Эйлером в 1760 г. и нашло широкое применение в машиностроении.
Зубчатое колесо эвольвентного профиля может входить в зацепление с другими колесами того же профиля, независимо от числа зубьев колес, нарезается простым инструментом, имеющим прямолинейный профиль зубьев, удобно для контроля. Зацепление малочувствительно к отклонениям межосевого расстояния, допускает корригирование.
Геометричкские параметры зубчатого зацепления (Рис. 1.)
О1 – О2 – оси зубчатых колес.
аW – межосевое расстояние.
Передаточное число зубчатой передачи определяется отношением радиусов О2Р и О1 Р.
 ,
,
где р – полюс зацепления.
Радиусы О2Р и О1 Р принадлежат окружностям, которыми перекатываются друг по другу без скольжения начальные окружности d W1 и dW2.
Во время передачи движения зуб ведущего зубчатого колеса входит в контакт, т.е. в зацепление с зубом ведомого колеса. При относительном перекатывании зубьев точка их контакта перемешается по некоторой наклонной линии, проходящей через полюс зацепления.
Геометрическое место точек контакта зубьев сопряженных профилей, называется линией зацепления.
В пространстве линия зацепления расположена по нормали к поверхности пятна контакта сопряженных поверхностей зубьев.
|
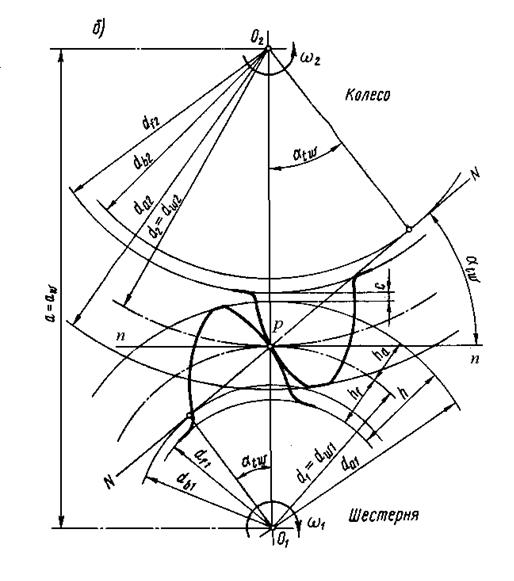
Линия зацепления наклонена к нормали n – n, проходящей через полюс, под углом a W, где a W – угол зацепления по ГОСТ 13755 – 81.
Эвольвентные профили зубьев образованы траекторией движения точки М, расположенной на прямой N – N обкатываемой без скольжения по окружностям с центрами О1 и О2, соответственно называемыми основными окружностями d В1 и d В2.
d В = dW·cos a W.
Диаметр окружности предназначенной для определения элементов зубьев и их размеров называется делительным – d.
d – диаметр делительной окружности.
Поверхность, отделяющая зубья от тела зубчатого колеса называется поверхностью впадин.
d f – диаметр окружностей впадин.
Поверхность, проходящая по вершинам зубьев зубчатого колеса, называется поверхностью вершин зубьев.
d α – диаметр окружностей вершин зубьев.
Расстояние между одноименными поверхностями соседних зубьев, измеренное по дуге концентрической окружности зубчатого колеса, называется окружным шагом – рt.
Различают делительный, начальный и другие окружные шаги зубьев.
Для косых шевронных и криволинейных зубьев кроме окружного шага различают шаг измеренный в плоскости перпендикулярной оси симметрии зуба – нормальный шаг – рn.
рn = рt·cos β
где β – угол наклона зубьев по делительному диаметру; β = 8 …400.
Линейная величина в π раз меньшая окружности шага зубьев, называется модулем зубьев – m
mt =  – окружной модуль;
– окружной модуль;
mn =  – нормальный модуль.
– нормальный модуль.
mn = mt · cos β – для косых зубьев;
mn = mt – для прямых зубьев.
Модуль – m основная характеристика размеров зубчатых и червячных колес.
Модули эвольвентных зубчатых колес стандартизованы по ГОСТ 9563 – 60.
Стандарты распространяются на цилиндрические и конические зубчатые колеса с прямыми зубьями. Они устанавливают, для цилиндрических колес значения нормальных модулей, для конических – значения внешних окружных делительных модулей.
Стандартом ГОСТ9563-60 предусмотрено два ряда модулей m (первый ряд считается предпочтительным), мм:
1-й ряд: …; 1,0; 1,25; 2; 2,5; 3; 4; 5; 6; 8; 10; 12; 16; 20; 25; 32; 40; … 100.
2-й ряд: …; 1,125; 1,375; 1,75; 2,25; 2,75; 3,5; 4,5; 5,5; 7; 9; 11; 14; 18; 22; 28; 36; 45; … 90.
При бесконечно большом числе зубчатого колеса, оно превращается в рейку, а эвольвентный профиль зуба – в прямолинейный, удобный для изготовления и измерения.
Контур профиля зубьев, полученный при Ζ ® ∞ называется исходным контуром.
В соответствии с исходным контуром осуществляется профилирование зубьев
эвольвентного зацепления и инструмента для их нарезания.
Параметры нормального сечения зубчатых колес с модулем m ³ 1 выбираются по ГОСТ 13755-81 (Рис. 2).
Для конических зубчатых колес с прямыми зубьями ГОСТ13754 – 68.
α – угол профиля зуба, α = 200;
а – а – средняя линия;
р – шаг;
ha – высота головки зуба, ha = m;
hf – высота ножки зуба, hf = 1,25m;
c – радиальный зазор, с = 0,25m;
hW – высота зуба, hW = 2,25 m.

Диаметр делительной окружности – d
πd = p·Z = π·m·Z, где Z – число зубьев
 |
d = m·Z
Диаметр окружности вершин зубьев
 |
da = d + 2 m = m Z + 2m = m(Z + 2).
 Диаметр окружности впадин
Диаметр окружности впадин
df = d + 2,5 m.
Коэффициент ширины зубьев – y выбирают по ГОСТ 2185 – 55
 yba =
yba =  ; ybd =
; ybd =  ; ybm =
; ybm =  .
.
Ширина зубчатого колеса – б определяется из вышеприведенных формул:
Межосевое расстояние – аW рассчитывают по формуле
 |
аW =  .
.
Дата добавления: 2015-09-05; просмотров: 463 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Обновлено 22.01.10 г. | | | Усилия в прямозубой передаче |