Читайте также:
|
Условие сборки заключается в определенном взаимном расположении сателлитов и центральных колес. Очевидно, что после установки первого из сателлитов установка последующих оказывается возможной, только если зубья сателлита расположены строго напротив впадин сопряженных с этим сателлитом колес. Выполняется это условие при таком подборе чисел зубьев, количестве сателлитов и их взаимного расположения, при которых обеспечивается правильное зацепление во всех парах зубчатых колес. Аналитически это условие для различных схем записывается как:
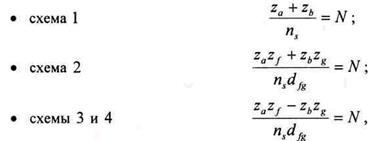
где N - любое целое число (критерий собираемости);
d fg - наибольший общий делитель чисел зубьев zf, и zg.
Если N не равно целому числу, то сборка невозможна. Проверка по условию сборки проводится при числе сателлитов пs > 1.
Условия правильного зацепления. Выполнение условия правильного зацепления обеспечивает отсутствие заклинивания передачи и достаточно надежную величину коэффициента перекрытия во всех парах зубчатых колес, выполненных без подреза к срезa зубьев.
Во избежание подреза зубьев эвольвентных нулевых колес для передачи внешнего зацепления [2] при α = 20° и hа=1 принимают Z ≥ 17, при hа=0.8 Z ≥ 14.
Для внутреннего зацепления в [1] приводятся дифференцированные значения допускаемых чисел зубьев (таблица 2.2).
Планетарные механизмы, как правило, проектируются и изготовляются с нулевыми колесами, но их можно составлять и из ненулевых колес с прямыми или косыми зубьями [2]. Число зубьев малого колеса при этом может быть значительно снижено и тем самым уменьшены габариты механизма.
2.3 КПД планетарных передач
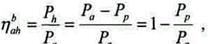
При расчете коэффициента полезного действия планетарной передачи можно воспользоваться методом обращенного движения. В качестве примера определим КПД планетарного редуктора, выполненного по схеме 3 с двумя внешними зацеплениями. Рассмотрим вариант, когда энергия передается от центрального колеса к водилу, а неподвижным звеном является колесо b. Тогда согласно определению КПД передачи равен
 (2.10)
(2.10)
где Pa,Ph, и Рp - соответственно мощности на осях центрального колеса и водила и
мощность потерь в редукторе.
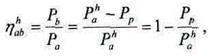
После мысленной остановки водила планетарная передача превращается в простой редуктор с фиксированными осями, так что можно записать
 (2.11)
(2.11)
откуда
 (2.12)
(2.12)
где Рha =Ta │ ωa – ωh│; Рa =Ta │ ωa │, Ta - вращающий момент на звене а.
Очевидно, что потери мощности не зависят от величин и знака скоростей относительного движения. Тогда из (1.10) с помощью (1.11) имеем
 (2.13)
(2.13)
Метод расчета, изложенный применительно к одной из возможных кинематических схем планетарных редукторов, можно использовать и для определения КПД других схем (см. таблицу 2.1).
2.4 Силовые и энергетические параметры планетарных передач
Рассмотрим силы, действующие на сателлит планетарного редуктора, выполненного по схеме 1, при передаче вращающего момента от входного вала к водилу при неподвижном звене b. Контуры колес и приложенные к ним нагрузки изображены на рис.2.4.

Рис.2.4.
В зацеплении зубьев прямозубых колес сила, нормальная к поверхности зуба, может быть разложена на две составляющие - касательную (окружную) к цилиндру колеса Fta, Ftb и перпендикулярную к ней радиальную Fra, Frb. Эти силовые факторы легко определяются из уравнений равновесия. Если момент вращения на входе редуктора обозначить через Ta, то
Fta = Ta / ra, (2.13)
где ra - радиус основной окружности центрального колеса.
Так как сателлит вращается с постоянной угловой скоростью, то алгебраическая сумма моментов всех действующих на него сил относительно оси вращения будет равна нулю, следовательно, Fta = Frb, а окружное усилие, приложенное к водилу, записывается как
Fth=Fta+Ftb=2Fta,. (2.14)
Момент вращения Тh, водила
Th = 2Fta(ra + rb)/2. (1.15)
где rb- радиус основной окружности неподвижного звена.
Дата добавления: 2015-09-06; просмотров: 139 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Основные геометрические размеры зубчатых колес | | | Радиальные составляющие в полюсах зацепления имеют вид |