Читайте также:
|
Токоприемниками согласно стандарту называют тяговые электрические аппараты, предназначенные для создания электрического контакта электрооборудования подвижного состава с контактной сетью. Конструкция токоприемника должна обеспечивать съем тока заданного значения при максимальной скорости движения, на которую рассчитан электроподвижной состав.
На советских и зарубежных электрифицированных железных дорогах эксплуатируются токоприемники разнообразных конструкций. Объясняется это тем, что электрификация железных дорог осуществляется как на постоянном, так и на переменном токе, а применяемый электроподвижной состав имеет различную мощность и конструкционную скорость. Наибольшее распространение получили пантографные токоприемники (пантографа).
В Советском Союзе на электровозах и электросекциях переменного тока установлены токоприемники ТЛ-13У. На электровозах постоянного тока наибольшее применение получили токоприемники П-3, П-5 и ЮРР, на электросекциях постоянного тока — ТЛ-13У или ТЛ-13М, используют также токоприемники П-І и ДЖ-5. Токоприемники ТЛ-13У и ТЛ-14М (рис. Ї35) различаются только типами полоза (соответственно с угольными вставками и металлокерамическими пластинами). За рубежом имеются токоприемники с незамкнутой (асимметричной) системой подвижных рам, а также с перекрещивающимися нижними рамами.
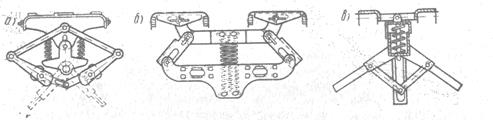
Токоприемники представляют собой сложные пространственные механизмы, состоящие из системы различных рычагов и легких рам, шарнирно соединенных между собой и обеспечивающих перемещение полозов по вертикали. Полозы закрепляют на рамах с помощью кареток, обеспечивающих необходимое подрессоривание полозом, а также их угловое перемещение относительно верхнего шарнира рам токоприемника. Подъемно-опускающие механизмы токоприемников (рис. 136). состоят из подъемных / и опускающих 2 пружин, пневматического цилиндра 3 и системы рычагов 4 пневматического привода. Опускающие пружины могут быть размещены внутри пневматического цилиндра (рис. 136, а, б) или выполнены в виде наружных пружин (рис. 136, в). С целью уменьшения массы пневматического цилиндра его выполняют ступенчатым: больший диаметр имеет та часть, в которой перемещается поршень, меньший — где расположена пружина.
Токоприемники, имеющие подъемно-опускающие механизмы, показанные на рис. 136, работают следующим образом. Когда давление воз-
-209-


духа в пневматическом цилиндре равно атмосферному и опускающая пружина разжата, токоприемник находится в опущенном положении.
Для подъема токоприемника в цилиндр через редукционное устройство (клапан) подавай! сжатый воздух, который, перемещая поршень н связанную? ним систему рычагов, сживает опускающие пружины, (пружину). При этом подъемные пружины, находившихся в растянутом состоянии, сокращаются и поднимают, нижние и верхние рамы токоприемника, вследствие чего, его полозы прижимаются к контактному проводу. Для опускания токоприемника выпускают сжатый воздух из цилиндра, опускающие пружины разжимаются и через систему рычагов передают усилия на рамы токоприемника; при этом подъемные пружины растягиваются, а вся подвижная система токоприемника.возвращается в начальное положение.
Редукционные клапаны в пневматических цилиндрах токоприемников предназначены для автоматического изменения скорости вертикального перемещения полоза при подъеме, и опускании токоприемника.
Они обеспечивают быстрый начальный подъем опущенного токоприемиика, а затем медленное его приближение к контактному проводу, чтобы полоз коснулся контактного провода без, удара, При опускании токоприемника полоз, наоборот, быстро отрывается от контактного провода, а затем спокойно опускается вниз. Такие режимы


-210-

достигаются автоматическим регулированием. Скорости подачи сжатого воздуха в цилиндр и выпуска его в атмосферу. Время подъема токоприемника из сложенного положения до максимальной рабочей высоты при номинальном давлении сжатого воздуха должно составлять 7—10 с, а время опускания — 3,5—6 с.
Постоянный контакт полоза токоприемника с проводом в случае изменения его высоты обеспечивается при движении электроподвижного состава перемещением подвижной системы токоприемника н работой только его подъемных пружин.
Каретки токоприемников (рис. 137) предназначены для улучшения качества токосъема при проходе «жестких» точек (мест с резким уменьшением эластичности контактного провода или наличием на нем сосредоточенных масс — зажимов и др.) и струновых пролетов цепной контактной подвески, в которых- контактный провод имеет неодинаковую 'эластичность. В эти моменты полозы вертикально перемещаются благодаря кареткам, т. е. с контактным проводом взаимодействует не весь токоприемник, а только его верхний узел, имеющий небольшую массу. Это уменьшает динамическую составляющую нажатий токоприемника на контактный провод, что обеспечивает лучшее качество токосъема, особенно при высоких скоростях движения электрО1-поездов. В двух полезных токоприемниках каретки обеспечивают также равномерное нажатие между полозами.
'•'Качественный токосъем токоприемниками при более высоких скоростях движения обеспечивают демпфированием их рам, а в некоторых случаях — и полозов. Демпфирование рам осуществляют с помощью телескопических гидравлических демпферов.
Элементы токоприемника перемещаются вертикально при его движении вдоль контактной подвески в результате неодинаковой эластичности контактного провода в струновых пролетах, неодинаковой эластичности цепных подвесок в середине пролета и у опор, местных: изменений высоты подвеса контактного провода над верхом головок рельсов у малогабаритных искусственных сооружений, на станциях и т. п.
Неодинаковая эластичность контактного провода в струновых пролетах вызывает вертикальные колебания полоза токоприемника с амплитудой 0,03—0,04 м и длиной волны 5—10 м, а в середине пролета
-211-


и у опор — с амплитудой 0,2—0,3 м при длине волны 50—80 м. Местные изменения высоты подвеса контактного провода у искусственных сооружений и на станциях (выполняемые с постепенным уклоном контактного провода, например 0,002) вызывают значительные вертикальные перемещения полоза токоприемника, достигающие 1,2—1,5 м. Таким образом, на большей части линии полоз токоприемника совершает вертикальные перемещения с амплитудой до 0,35 м и только на коротких участках пути — значительные вертикальные перемещения, постигающие 1,5 м. Этим обстоятельством пользуются при разработке конструкций токоприемников для высоких скоростей движения.
Чтобы обеспечить большой рабочий ход (1,5—2 м) и качественный токосъем при высоких скоростях движения, токоприемники выполняют сдвоенными (двухступенчатыми), т. е. из двух расположенных одна над другой подвижных систем (рис. 138). Верхняя подвижная система с рабочим ходом 0,4—0,5 м и небольшой массой взаимодействует контактной подвеской по высоте в пределах разности отжатий контактного провода в середине пролета и у опор; обе подвижные системы токоприемника взаимодействуют с контактной подвеской на участках со значительным изменением высоты подвеса контактного провода над уровнем головок рельсов.
Одной из разновидностей таких токоприемников является токоприемник Сп-6М (рис. 138, а). Он состоит из двух подвижных систем; нижней в виде параллелограмма / и верхней 2 в виде пятизвенника При небольших изменениях высоты контактного провода ± 0,3 м с ним взаимодействует только верхняя система, имеющая небольшую массу 24,5 кг, нижняя система при этом остается неподвижной. При значительных изменениях высоты контактного провода вступает в ра-
-212-
боту и нижняя система токоприемника. Достигается это автоматически с помощью пневматической связи между верхней Ч нижней подвижными системами. Токоприемник Сп-бМ имеет следующие характеристики: допустимый длительный ток при движении 1650 А, рабочий ход 2,15 м, ширина полоза 440 мм, масса полоза 15 кг, приведенная масса токоприемника 24,5 кг.
В верхней и нижней системах токоприемника установлены двухсторонние (симметричные) гидравлические демпферы.
Во Франции для скоростей до 400 км/ч создан сдвоенный токоприемник (рис, 138, б). Функцию нижней подвижной системы в нем выполняет упрощенная рама токоприемника AM с демпферами, а верхней подвижной системы — небольшой асимметричный токоприемник AM с рабочим ходом 0,4, его масса равна 14 кг. Нижняя система, так же как и токоприемника Сп-бМ, вступает в работу только при значительных изменениях высоты контактного провода над уровнем головок рельсов. Такая работа токоприемника достигается соответствующим демпфированием нижней и верхней подвижных систем токоприемника гидравлическими амортизаторами.
Для линий, рассчитанных на скорость движения поезов 250— 350 км/ч, рабочий диапазон высоты подвеса контактного провода над уровнем верха головок рельсов принимают равным не более 0,5— 0,55 мм. Это позволяет использовать легкие малогабаритные токоприемники с небольшим рабочим ходом (не более 0,85 м).
Дата добавления: 2015-09-03; просмотров: 285 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Типовые способы закрепления опор в грунте | | | Характеристики токоприемников |