Читайте также:
|
В случае выхода из строя CAP переключатель ПВА устанавливают в положение, соответствующее аварийному возбуждению. При этом контактами ПВА замыкаются накоротко тиристоры Т1 и Т2 блока БВГ, а в цепь возбуждения возбудителя В вводится резистор Рва. При переводе контроллера машиниста с нулевой на более высокие позиции участки резистора Рва шунтируются контактами контакторов КВА1 (на 7 — 15-й позициях) и КВА2 (на 12 — 15-й позициях), что приводит к увеличению тока возбуждения возбудителя и, следовательно, тока возбуждения тягового генератора.
В аварийном режиме ток возбуждения генератора выпрямляется неуправляемым мостом Д1 —Д4 блока БВГ, а величина его на каждой позиции контроллера машиниста остается неизменной. Благодаря большому падению напряжения на индуктивном сопротивлении обмоток и реакции якоря внешние характеристики генератора имеют резко падающий характер (рис. 5). Поэтому не требуется принимать специальных мер для ограничения максимального тока тягового генератора.
СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОГО ТОРМОЗА (САРТ)
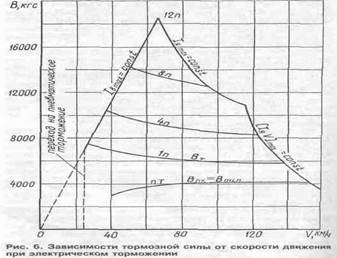
Система автоматического регулирования электрического тормоза (САРТ) обеспечивает получение требуемых тормозных характеристик тепловоза (рис. 6). Возможности электрического тормоза ограничены допустимыми режимами работы тяговых двигателей, поэтому предельная тормозная характеристика состоит из отдельных участков ограничений: по максимальному току возбуждения Ig maxi максимальному току якоря 1д тах и ограничения тока якоря по коммутационной способности электродвигателей, которое характеризуется максимально допустимой величиной произведения тока якоря на скорость движения (IqV)max.
При работе на участке характеристики Iq max = const реализуется максимальная мощность тормоза, а на других участках она уменьшается. Чтобы машинист имел возможность изменять тормозное усилие и устанавливать его в соответствии с реальными условиями движения, предусмотрены частичные характеристики с ограничением по величине тормозного усилия Вщ. Для сжатия состава перед включением полного тормозного усилия введена ступень предварительного торможения с минимальным тормозным усилием Впт = Втщ, которая включается на 6 с.
Кроме перечисленных, САРТ обеспечивает получение характеристики V = const. т.е. поддержание при движении на спусках заданной машинистом скорости движения путем автоматического регулирования тормозного усилия. Регулирование тормозной силы осуществляется от Bmin до значения Вш, установленного машинистом. Минимальная тормозная сила Втщ необходима для поддержания сцепных устройств поезда в сжатом состоянии и предотвращения нежелательных продольных реакций. При срабатывании защиты от юза САРТ уменьшает тормозную силу до некоторого значения В|оз, при котором восстанавливается сцепление колес с рельсами, и юз прекращается.
Элементы системы автоматического регулирования САРТ расположены в блоке электрического тормоза БЭТ. Учитывая, что они требуют различные напряжения питания, в БЭТ предусмотрен свой блок питания, подключаемый к источнику постоянного напряжения 110 В при включении контакторов КТ или КВВ. На тепловозах ТЭП70 с № 208 вместо блока КУА-14 внедрен новый блок электрического тормоза типа КУА-14Б, в котором элементы усиления и сравнения сигналов выполнены на микросхемах.
Основными органами управления САРТ являются контроллер машиниста КМ, переключатель тормозной силы ПТС, а также поездной кран машиниста КМТ, при помощи которого электрический тормоз можно включить в режим служебного или экстренного торможения. Контроллер машиниста КМ обеспечивает управление тепловозом в режимах тяги и торможения. При управлении в режиме тяги рукоятку контроллера поворачивают вправо, а при торможении — влево от нулевого положения.
В режиме торможения контроллер, кроме нулевой, имеет следующие фиксированные позиции: П — позиция сборки схемы (подготовка к работе); 1 — позиция задания максимальной скорости; 2 — позиция остановочного торможения. Между 1 -и и 2-й позициями расположена зона бесступенчатого задания скорости движения при торможении в пределах от максимального до минимального значения. Для этого с валом тормозного контролле-
pa связан ротор сельсина, который используется как поворотный трансформатор. Напряжение на выходе сельсина, зависящее от положения (угла поворота) ротора, действует в качестве задающего сигнала для САРТ.
Переключатель тормозной силы ПТС имеет 12 положений. При помощи ПТС задают величину ограничиваемой тормозной силы Вщ, причем на двенадцатом положении реализуется предельная тормозная характеристика. В режиме электрического торможения возбуждение тягового генератора осуществляется аналогично тяговому режиму от возбудителя В через тиристорный усилитель (блок БВГ). Однако в данном случае для стабилизации работы системы потребовалось ввести гибкую отрицательную обратную связь по току возбуждения тяговых двигателей. Для этой цели последовательно с обмоткой возбуждения генератора включена цепь обмоток возбуждения электродвигателей.
При этом конструкторы предусмотрели, чтобы падение напряжения в цепи обмоток возбуждения тяговых двигателей было направлено встречно напряжению на выходе блока БВГ, т.е. уменьшало напряжение на обмотке возбуждения генератора. Благодаря этому при росте тока возбуждения электродвигателей, а следовательно, падения напряжения на их обмотках, ток возбуждения генератора будет уменьшаться и, наоборот, при уменьшении тока возбуждения электродвигателей ток возбуждения генератора будет увеличиваться. Таким образом осуществляется демпфирующее воздействие на систему при переходных процессах.
Цепь включения обмотки возбуждения генератора следующая:
"плюс" БВГ, контакт КВГ, провод 305, шунт Ш4, провода 311, 328х2, контакт контактора КТ1 (контакт ТП разомкнут), провод 329х2, шина 2х111Ш, контакт КП7, далее описанная ранее цепь последовательно включенных обмоток возбуждения электродвигателей, шина 2х193Ш, шунт1111, провод 318х2, контакт ТП, провод 306, обмотка возбуждения генератора, провод 307, "минус" БВГ.
Управляющие импульсы на тиристоры Т1 и Т2 блока БВГ поступают от блока БУВ. При работе электрического тормоза сигналы уставок на потенциометре Rp4 превышают сигналы обратной связи потенциометра Rp3, поэтому все каналы регулирования CAP тягового режима заперты, и ток по обмотке управления ОУ магнитного усилителя МУ (блок БУВ) не протекает. Регулирование фазы управляющих импульсов, а следовательно, и тока возбуждения, осуществляется изменением тока в обмотке управления ОУТ магнитного усилителя. Обмотка ОУТ подключена к выходному усилителю блока БЭТ. Ток протекает по цепи: контакт 8/4 разъема БЭТ, провод 1386, зажим 5/23—24, провод 1385, зажим 5/21—22, провод 1384, обмотка управления ОУТ, провод 476, зажим 24/4—5, провод 1408, контакт 8/10 БЭТ.
Входная цепь усилителя в блоке БЭТ подключена к селективному узлу САРТ, который имеет пять каналов регулирования. Принцип построения каналов регулирования аналогичен системе CAP, т.е. имеются узлы, на которых сравниваются сигналы уставок и обратных связей, причем ток на выходе этих узлов протекает только в том случае, если напряжение обратной связи больше напряжения уставки. В зависимости от величины регулируемых параметров ток на вход усилителя блока БЭТ и, следовательно, в обмотку управления ОУТ магнитного усилителя МУ, поступает только из одного канала регулирования — остальные закрыты. САРТ имеет следующие каналы регулирования.
Канал ограничения тока якоря Iq max = const. Сигналы уставок ограничения тока якоря и тока возбуждения формируются в блоке БЭТ узлами, получающими питание стабилизированным напряжением 24 В от блока питания БЭТ. Сигнал обратной связи по току якоря электродвигателей поступает на блок БЭТ от трансформаторов постоянного тока ТрПТ1 — ТрПТЗ через схему выделения максимального сигнала — выпрямительные мосты В1 — ВЗ блока БС2. Ток протекает по цепи: контакт 8 разъема БС2, провод 478, шунтШ7, провод 481, катушка РП1, провод 482, катушка РП2, провод
1407. контакт 8/11 разъема БЭТ, контакт 8/10 разъема БЭТ, провод
1408. зажим 24/4—5, провод 477, контакт 2 разъема БС2.
В канал ограничения тока якоря вводится также сигнал обратной связи по скорости движения тепловоза от тахогенераторов Тг1 —Тгб, который позволяет при скоростях движения больше 115— 120 км/ч уменьшить ток якоря таким образом, чтобы приблизительно соблюдалось условие (Iq V)max es const. Так обеспечивается ог
раничение тока якоря по коммутационной способности тяговых двигателей.
Канал ограничения тока возбуждения Ig max = const. Сигнал обратной связи по току возбуждения тяговых двигателей поступает от трансформатора постоянного тока ТрПТ4 по проводам 298 и 297 на контакты 8/13 и 8/14 разъема блока БЭТ. В блоке БЭТ сигнал обратной связи сравнивается с сигналом уставки и вырабатывается управляющий сигнал, который поступает на блок БУВ.
Канал ограничения тормозной силы By = const. При работе данного канала в зависимости от величины уставки поддерживается определенное значение тормозной силы Вщ = f(v) (см. рис. 6). Напряжение уставки формируется следующим образом. На потенциометр Руд задания тормозной силы, встроенный в контроллер КМ, подается переменное напряжение 80 В от блока питания БЭТ по цепи: контакт 10/18 БЭТ, провод 1357, потенциометр Rye, провод 1359, контакт 10/2 БЭТ, подстроечные резисторы в блоке БЭТ, контакт 10/1 БЭТ, провод 1354, контакт КБ2, провод 1355, контакт реле РУ27, провода 1379, 1380, контакт 9/9 БЭТ.
Напряжение, снимаемое с потенциометра Rye при помощи переключателя тормозной силы ПТС, подается по проводу 1362 через контакт 10/20 на блок БЭТ, где формируется напряжение уставки по тормозной силе. Если управление осуществляется со второго пульта управления (задняя кабина), то напряжение 80 В от блока питания БЭТ на потенциометр Rye второго пульта подается по цепи: контакт 11/1 БЭТ, провод 1350, потенциометр Rye (на схеме не показан), провод 1360, контакт 11/3 БЭТ, контакт 11/2 БЭТ, провод 1378, контакт КБ2, провод 1355, контакт реле РУ27, провода 1379, 1380, контакт 9/9 БЭТ. Напряжение, снятое с потенциометра переключателем ПТС на втором пульте управления, поступает на блок БЭТ по проводу 1363 через контакт 11/20 БЭТ.
При экстренном торможении напряжение уставки увеличивается до максимального значения, и торможение происходит по предельным характеристикам. Увеличенное напряжение уставки подается от блока питания БЭТ (" 80 В) при включении реле управления экстренным торможением РУ27 по цепи: контакт 8/16 БЭТ, провода 1382 и 1381, контакт РУ27, провода 1379 и 1380, контакт 9/9 БЭТ, Вторым контактом реле РУ27 (1355, 1379) разрывается цепь питания потенциометра Руд.
При срабатывании защиты от юза включается реле РУ16 и замыкает цепь: контакт 9/6 БЭТ, провода 1377 и 1376, контакт РУ16, провода 1374 и 1375, контакт 8/9 БЭТ. Величины уставки и тормозной силы при этом уменьшаются, что приводит к прекращению юза. Сигнал обратной связи по тормозной силе формируется исходя из того, что она пропорциональна произведению тока якоря 1я на ток возбуждения Ig электродвигателей.
Выше было описано, как поступают сигналы по токам якоря и возбуждения на блок БЭТ. В блоке БЭТ вырабатывается сигнал, пропорциональный их произведению, после чего он сравнивается с сигналом уставки и формируется управляющий сигнал, поступающий на блок БУВ.
Канал ограничения минимальной тормозной силы Bmin- Этот канал действует так же, как канал ограничения тормозной силы, но сигнал уставки в блоке БЭТ формируется в виде постоянного напряжения.
Канал поддержания скорости движения V = const. Сигнал задания по скорости поступает с сельсина-датчика СД, ротор которого соединен с валом тормозного контроллера КМ. Обмотка ротора сельсина получает питание переменным током 80 В от блока питания БЭТ по цепи: контакт 9/9 БЭТ, провода 1380 и 1379, контакт реле РУ27, провод 1355, контакт КБ2, провод 1352, контакт контроллера КМ, ротор СД, провода 1371 и 1373, контакт 9/5 БЭТ. Напряжение, трансформированное из роторной обмотки СД в статорную, зависит от угла поворота ротора, т.е. от положения рукоятки тормозного контроллера.
Это напряжение, снимаемое с зажимов Ф1 и ФЗ сельсина, по проводам 1365 и 1368 через контакты 10/15 и 10/14 подается на блок БЭТ. Если управление осуществляется со второго пульта, то напряжение с его сельсина (на схеме не показан) поступает на блок БЭТ по проводам 1366 и 1369 через контакты 11/15 и 11/16. К блоку БЭТ подключены указатели скорости УС (находятся на каждом пульте управления), по которым машинист, поворачивая рукоятку контроллера КМ, устанавливает желательную скорость движения при торможении.
Сигналы обратной связи по скорости движения, поступающие с тахогенераторов Тг1 —Тгб, которые установлены на всех колесных парах тепловоза, подаются на схему выделения максимального сигнала блока БЭТ. Выделенный максимальный сигнал тахогенераторов сравнивается с сигналом от сельсина-датчика, и разность этих сигналов в виде сигнала уставки поступает в канал поддержания скорости. Сигналом обратной связи для этого канала служит сигнал по току возбуждения 1в электродвигателей, поступающий от трансформатора тока ТрПТ4.
Если реальная скорость движения выше заданной машинистом, то напряжение уставки выше напряжения обратной связи, канал регулирования скорости закрыт и торможение осуществляется по предельным характеристикам. Когда скорость снижается до заданного значения, канал вступает в работу и поддерживает заданную скорость движения путем регулирования тока возбуждения и, следовательно, тормозной силы электродвигателей. При снижении тормозной силы (в процессе поддержания скорости движения) до заданного минимального значения вступает в работу канал ограничения (поддержания) минимальной тормозной силы Bmin. Это позволяет сохранить сжатие состава и избежать нежелательных продольных реакций в поезде.
При включении электрического тормоза питание 24 В на элементы блока БЭТ подается по цепи: контакт 9/8 БЭТ, провод 1390, зажим 5/27—28, контакт реле времени РВИ, зажим 5/26, провод 1388, контакт 8/7 БЭТ. Реле времени РВ11 задерживает подачу питания на 6 с. В этот промежуток времени происходит предварительное торможение с минимальным тормозным усилием.
Дата добавления: 2015-08-21; просмотров: 170 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| СИЛОВЫЕ ЦЕПИ | | | РАБОТА САРТ |