Якорная цепь двигателя постоянного тока с независимым возбуждением получает питание от источника напряжения с односторонней проводимостью. Нарисуйте механические характеристики и укажите возможные режимы работы привода.
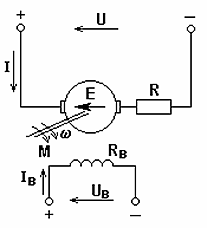
В общем случае привод описывается следующей системой уравнений:
eП=eД+iЯЦRЯЦ+LЯЦpiЯЦ; где p=d/dt
eД=СДФω;
MД=СДФiЯ;
MД-MC=Jpω;
UВ=iBRОВ+2pnkσwОВpФ;
Ф=f(F);
F=iBwОВ;
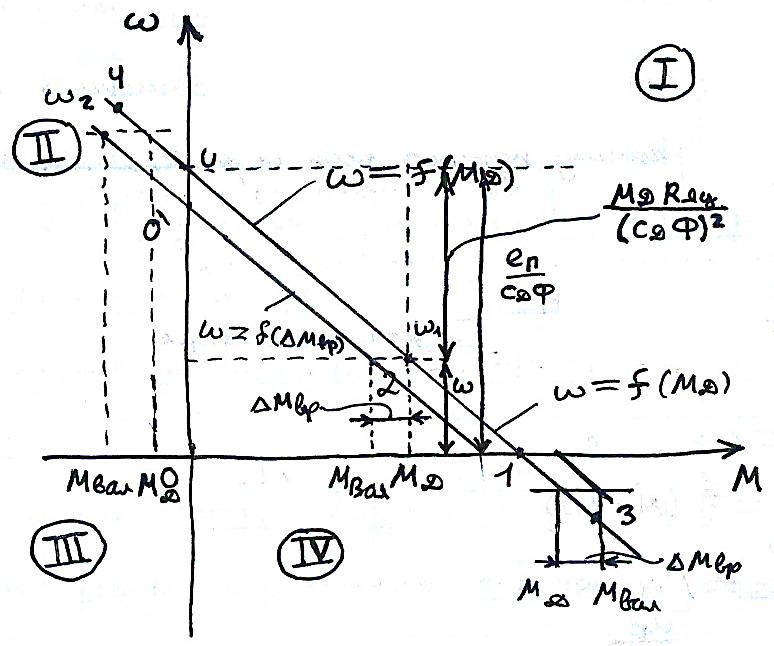
Механическая характеристика – одна из статических характеристик: ω=f(M)(MД=МС, eП=const, Ф=const)
для перехода к статическим характеристикам необходимо положить p=0:
eП=eД+iЯЦRЯЦ; (1) 
eД=СДФω; (2)(1),(2) => 
MД=СДФiЯ;
MД-MC=0;
UВ=iBRОВ;
 Ф=f(F);
Ф=f(F);
F=iBwОВ;
(.) 0 МД=0,  – режим идеального ХХ;
– режим идеального ХХ;
(.) 1 

(.) 2 – двигатель работает в двигательном режиме:

Двигатель потребляет мощность от преобразователя и за вычетом потерь передает на ИО в виде механической мощности.
(.) 3 – противотоковый режим (противовключение) (тормозной режим).



Двигатель вращается в сторону, противоположную вращению двигателя в двигательном режиме. Происходит потому, что на валу двигателя действует внешний момент, заставляющий вращаться двигатель в другую сторону. Ток якоря превышает ток КЗ, и вся мощность расходуется на нагрев сопротивления якорной цепи.
(.) 4 – Режим рекуперативного торможения. Скорость в этом случае:


В этом режиме двигатель вращается в том же направлении, что и в двигательном режиме, но ЭДС двигателя больше, чем ЭДС преобразователя, и следствием этого является изменение направления протекания тока и изменение знака момента. В режиме рекуперативного торможения основная часть тормозной мощности через преобразователь возвращается в питающую сеть.

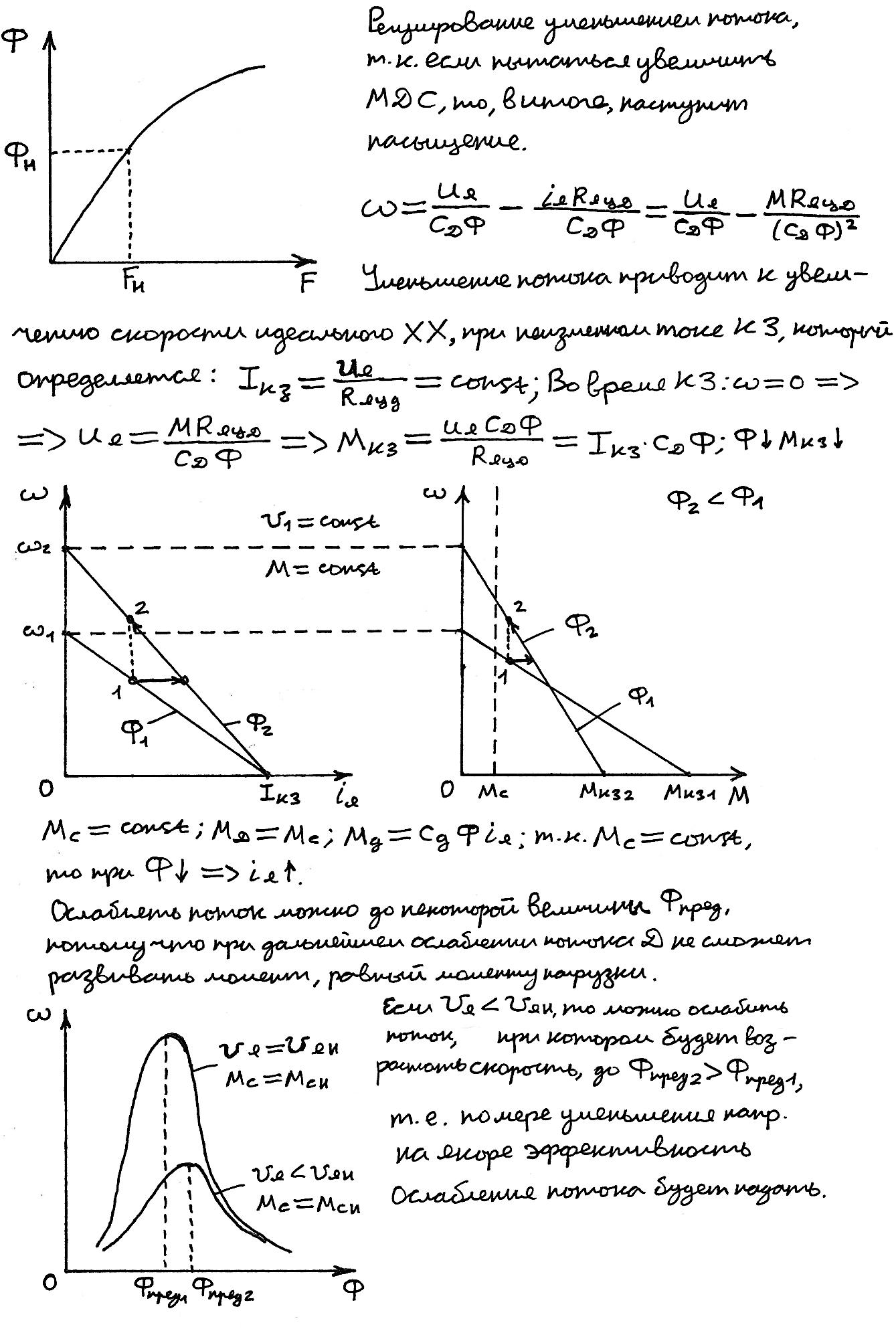
4.Двигатель постоянного тока с независимым возбуждением работает на некоторой установившейся скорости ω=ωнач при U1 = const, М=const, и Ф = Фнач. Покажите на механической и электромеханической характеристиках, как происходит переход из одной рабочей точки в другую при уменьшении потока и неизменном моменте нагрузки. Как изменится ток якоря? Приведите формулы и характеристики.
5.Перечислите известные вам способы ограничения якорного тока в приводе с двигателем постоянного тока с независимым возбуждением и дайте их структурные схемы. Дайте краткие описания.
Ввод добавочного сопротивления.
Введение Rдоб в якорную цепь приводит к смягчению электромеханической характеристики при неизменном значении скорости идеального ХХ ω0.
Большой ток Iкз недопустим в двигателе. Если величина Iкз при отсутствии Rдоб недопустимо велика, то для ограничения тока КЗ можно ввести Rдоб.
Способ редко применяется изза недостатков: - мягкость характеристики, - безвозвратная утрата мощности в добавочном сопротивлении.
Обычно вводят добавочное сопротивление в такой схеме для ограничения якорного тока и пускового момента
| М |
| Rдоб1 |
| Rдоб2 |
| Rдоб3 |
| Rдоб |
Пусковая диаграмма: Сначала вводится большое сопр, затем оно уменьшается, т.о. контролируем скорость.
| ω |
| ω0 |
| ω |
| ω3 |
| ω2 |
| ω1 |
| Rдоб=0 |
| Rдоб3 |
| Rдоб2+Rдоб1 |
| Rдоб |
| I |
| I2 |
| Ic |
з-низменения тока:
| I1 |
| I2 |
| Ic |
| t0 |
| t1 |
| t2 |
| t3 |
| iя=f(t) |
Когда ток спадает до значения I2. Когда ЭДС двигателя примерно равное напряжению на якоре будет становиться равное ед1=сд’ω1.
Дата добавления: 2015-10-31; просмотров: 100 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ПРОХОЖДЕНИЕ СЛУЧАЙНЫХ СИГНАЛОВ ЧЕРЕЗ ЛИНЕЙНЫЕ УСТРОЙСТВА | | | Использование УОТ |