Читайте также:
|
Уменьшение погрешности измерения:
1) Введение дополнительных функций и соответственно опыта оператора.
2) Усложнение конструкции прибора.
3) Cтабилизация важнейших параметров технологическим путем, т.е. путем использования наиболее стабильных деталей, материалов и соответствующей технологии изготовления.
4) Пассивная защита от быстро изменяющихся влияющих величин, т.е. уменбшение случайных погрешностей путем применения фмильтрации, амортизации, теплоизоляции и т.д.
5) Активная защита от медленно изменяющихся влияющих величин путем стабилизации этих величин.
6) Коррекция систематических и прогрессирующих погрешностей и статическая обработка случайных погрешностей.
Учет и устранение погрешностей измерительных приборов в эксплуатационных условиях. Динамические погрешности измерения.
8) Измеряемые физические параметры обычно изменяются с течением времени, поэтому для оценки точности измерений необходимо знать, как зависит погрешность измерений от динамических характеристик измеряемой величины, т.е. какова динамическая компонента погрешности измерений.
9) Оценка величины динамической погрешности является сравнительно сложным процессом. Проблема возникает потому, что динамическая погрешность зависит не только от динамической модели измерительного канала, но и от формы измеряемого сигнала.
10) Основными источниками динамической погрешности являются естественная инерционность физических процессов, протекающих в датчиках, процессы заряда входной емкости измерительного устройства, инерционность фильтров, использованных для устранения алиасного эффекта и подавления помех в измерительном канале.
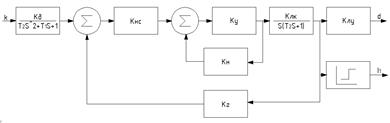
Математические структурные схемы приборов контроля.
А)

Б)
В)
 г)
г) 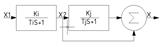
Д)

На рисунке изображены математические структурные схемы прибора непосредственной оценки (рис а) и прибора со вторичным электрическим комплектом (рис б). Схема изображенная на (рис а) характерна для приборов местных постов: пружинных манометров, вольтметров, амперметров, частотомеров, а показанная на (рис б) – для приборов блочных и центральных щитов: расходомеров, приборов контроля давления, перепадов давления, уровнемеров.
Дата добавления: 2015-10-23; просмотров: 113 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Основные метрологические характеристики приборов. | | | Количество информации с учетом погрешностей каналов контроля |