Читайте также:
|
К качеству работы следящих систем регуляторов предъявляются следующие требования:
- отсутствие автоколебаний в контуре следящей системы,
- статическая ошибка не должна превышать зону нечувствительности,
- максимальное быстродействие системы,
- максимально допустимое динамическое отклонение (перерегулирование)
не более 3%,
- отсутствие колебательности переходных процессов.
Для определения максимального быстродействия системы была получена разгонная характеристика ИМ [3] график которой показан на рис. 2.1.
Эксперимент при этом проводился следующим образом:
- включалось дистанционное управление исполнительным механизмом,
- с помощью кнопок дистанционного управления регулирующий орган сна-
чала устанавливался в закрытое положение (M= 0), а затем перемещался до
положения полного открытия (M =100%).
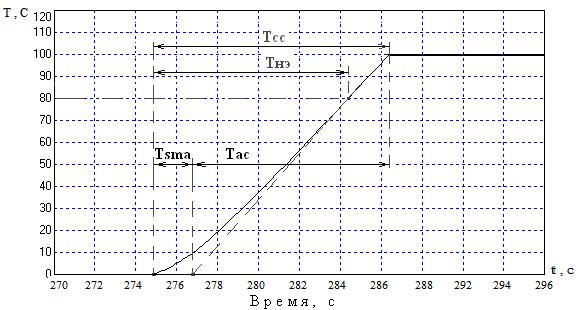
Рис. 2.1 Разгонная характеристика исполнительного механизма.
График разгонной характеристики ИМ соответствует двухемкостному нейтральному объекту регулирования с передаточной функцией [3]

Коэффициенты передаточной функции ИМ являются его конструктивными параметрами:
Ksma – коэффициент передачи электродвигателя ИМ,
Tsma – постоянная времени электродвигателя ИМ,
Tac – время ИМ.
Значения конструктивных параметров ИМ, установленные по заданию на курсовую работу, содержатся в таблице 2.1.
Экспериментальные значения конструктивных параметров ИМ, определенные по его разгонной характеристике и приведенные в таблице 2.1
практически совпадают с установленными значениями.
Таблица 2.1
Конструктивные параметры ИМ
| №№ п.п. | Наименование параметра | Обозна- чение | Числен. значен. | |
| установ-лено | эксперимент | |||
| ККК Коэффициент передачи элек- тродвигателя. | Ksma | 1.0 | - | |
| Постоянная времени электродвигателя, с | Tsma | 2.0 | 1.9 | |
| Время исполнительного механизма, с | Tac | 8.8 | ||
| Относительная инерционность ИМ. | Tsma/ Tac | 0.22 | 0.21 | |
| Минимальное время полного перемещения ИМ (на 100%), с | Тсс | 11.6 | ||
| Минимальное время переме-щения ИМ на 80% (эталон для настройки), с | Тнэ | - |
Время полного перемещения ИМ от 0 до 100% Тсс=Tsma+Tac ( рис. 2.1) является минимально возможным интервалом времени, за который следящая система может обеспечить полный ход ИМ.
Настройка зоны нечувствительности Db заключается в определении минимального значения Db, при котором отсутствуют автоколебания в сле-дящей системе. При такой величине Db следящая система будет иметь мини-мально достижимую статическую погрешность.
Настройка зоны нечувствительности выполняется по переходным процессам в системе при небольших (примерно на 10%) изменениях сигнала заданного положении исполнительного механизма Мз.
Настройку зоны нечувствительности начинают при Db =0, при которой в следящей системе возникают автоколебаний, и продолжают, увеличивая Db с шагом 0.2%-0.4%, до прекращения автоколебаний.
Определение показателей работы следящей системы работы произво-
дится с целью проверки того, что следящая система удовлетворяет приведен-ным выше требованиям, и с целью корректировки настроечных параметров системы при необходимости.
Показатели работы следящей системы определяются по переходным процессам в системе, вызванным скачкообразным изменением заданного положения исполнительного механизма Мз:
- увеличение Мз с 10% до 90%,
- уменьшение Мз с 90% до 10%.
Настройка следящей системы без КУП.
Настройка зоны нечувствительности следящей системы производилась по переходным процессам, представленным на рис. 2.3.

Рис. 2.3 Настройка зоны нечувствительности следящей системы
без КУП.
Графики процессов показывают:
- при зоне нечувствительности Db =0 в следящей системе возникают автоко-
лебания сигнала Uao на выходе усилителя при практически неподвижном
ИМ;
- при Db =1.2% автоколебания исчезают, но сохраняется колебательность
процессов;
- при Db =1.6% процессы становятся апериодическими (без колебательности).
Таким образом, в следящей системе без КУП принимается зона нечув-ствительности Db =1.6%.
Таблица 2.2
Показатели качества работы следящей системы.
| №№ п.п. | Наименование величины | Обозна- чение | Численные значения | |
| КУП. | - | отсутст. | имеется | |
| Зона нечувствительности, %. | Db | 1.6 | 0.8 | |
| Параметры КУП: | kpp | - | 1.0 | |
| Тdp=0.05Tac | - | 0.5 | ||
| Номер рисунка с графиками переходных процессов. | 2.3 | 2.3 | ||
| Минимальное время переходного процесса, с. | Тнэ (табл. 2.1) | |||
| Увеличение Мз: | ||||
| Максимальное динамическое отклонение, %. | dMm1 | 6.0 | 1.0 | |
| Время переходного процесса, с. | Тн1 | 5.1 | 5.1 | |
| Уменьшение Мз: | ||||
| Максимальное динамическое отклонение, %. | dMm2 | 7.0 | 1.0 | |
| Время переходного процесса, с. | Тн2 | 5.0 | 5.0 |
Для следящей системы без КУП по графикам переходных процессов на рис. 2.3 и их показателям в таблице 2.2 можно сделать следующие выводы:
- время переходных процессов (Тн1 и Тн2) не слишком превосходит мини-
мальное время процесса Тнэ, то есть быстродействие данного варианта сле-
дящей системы является допустимым;
-максимальное динамическое отклонение dMm1 и dMm2 превосходит
предельную величину 3%, что не допустимо;
- следящая система без КУП не обладает требуемым качеством ее работы.
Дата добавления: 2015-09-05; просмотров: 40 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Принцип действия контура позиционирования | | | НАСТРОЙКА САР АЛГОРИТМИЧЕСКИМ МЕТОДОМ |