Читайте также:
|
Наиболее эффективными штабелевочно-погрузочными механизмами на нижних складах являются козловые и башенные краны, кабель-крановые установки. Подъем и транспортировка пачек лесоматериалов этими кранами производится при помощи механизмов перемещения крана, механизмов перемещения груза и грузоподъемного механизма. Захват пачек сортиментов (хлыстов) обычно производится гибкими стропными комплектами, специальными захватывающими устройствами и грейферами.
Рассмотрим возможные принципы автоматизации управления такими крановыми установками. Штабелевочно-погрузоч-ные краны в зависимости от степени автоматизации рабочих процессов могут работать в полуавтоматическом и автоматическом режимах. В полуавтоматических системах полностью автоматизирован разгон и торможение приводов, а пуск и остановки привода осуществляется оператором при помощи коман-доконтроллеров, кнопок, ключей, рукояток (см. рис. 4.13; 4.14; 4.15; 4.16; 4.17; 4.18).
Наиболее простым способом управления является электрическая система с релейными элементами. Эта система состоит из слаботочной цепи управления и силовой цепи исполнительных элементов. Слаботочная цепь включает пульт управления и блок реле, которые выполняют функции усилителя и размножения сигналов управления. Силовая цепь состоит из реверсивных контакторов и исполнительных элементов (двигателей). В этом случае каждое реле имеет отдельный канал связи и управляет соответствующими контактором. Число каналов связи и релейной аппаратуры определяется числом команд, в свою очередь зависит от режима работы крана. Примером такого способа релейного управления является ранее рассмотренный метод управления кабель-крановой установки на разгрузке хлыстов (см. рис. 13.3).
Указанный метод может иметь как местное, так и дистанционное управление по проводам. Следует заметить, что в тех случаях, когда работа крана производится на площадях с ограниченной видимостью (штабеля, эстакады и т. п.), наиболее
эффективным следует признать метод телеуправления (проводной, громкоговорящую связь, радио, телевидение).
Проводная связь осуществляется при помощи телефона, который имеется у крановщика и рабочего грузчика. Недостатком этой связи является наличие проводов, которые ограничивают возможности маневрирования рабочих. С этой точки зрения наиболее удобной является громкоговорящая связь, когда обмен информациями производится при помощи громкоговорителя.
Простейшими аппаратами громкоговорящей связи являются электромегафоны типа «Балсас», «Вития» и ЭМ-2. Для двусторонней громкоговорящей связи используются устройства ПУ-1, ОПУ-1. Основными элементами громкоговорящей связи являются микрофоны и усилители.
Радиовещание использует только системы громкоговорящей связи с центральными усилителями. Основными элементами являются микрофоны, радиотрансляционные усилители, коммутирующие устройства и абонентские громкоговорители. В пределах нижнего склада для оперативной работы крановщиков с грузчиками наиболее эффективными являются носимые УКВ-радиостанции «Кактус», «Ласточка», «Тюльпан», «Сирена» и «Стройка».
Промышленное телевидение показало целесообразность ее применения и высокую эффективность. Использование телевизионных установок на нижних складах, особенно на шта-белевочно-погрузочных работах, весьма перспективно, так как позволяет вести дистанционное наблюдение за работой. При этом значительно сокращается время получения текущей информации и увеличивается ее достоверность, а следовательно, повышается оперативность управления. Для работы на нижнем складе наиболее эффективными являются пятикамерные промышленные телевизионные установки ПТУ-3, ПТУ-28, ПТУ-34 и ПТУ-33.
При телеуправлении грузоподъемными кранами, работающими на штабелевке и погрузке, применяется в основном принцип последовательного по времени использования каналов связи. Обычно подача команд производится по распределительному принципу. Примером такого управления может служить схема с шаговым искателем (рис. 16.1), где подвижный контакт производит поочередное подключение реле, управляющих соответствующими пускателями приводов. Недостатком этого способа является значительное число каналов связи и невозможность изменения вида движения крана по желанию оператора, так как все реле включены в определенной последовательности.
Наиболее удобной следует считать систему управления кранами с использованием контактного распределителя, принцип
работы которого основан на временном разделении или совмещении команд, задаваемых оператором. Эти системы удобны и просты в эксплуатации при дистанционном управлении краном.
Система состоит из двух станций (см. рис. 16.1)—передающей и приемной. Передающая станция представляет легкий переносной пульт управления. Приемная станция монтируется на кране. Скользящие контакты К приводятся во вращение от двух синхронных двигателей. Каждый неподвижный контакт передающей станции соединен с кнопкой SB 1... SB 4 заказа
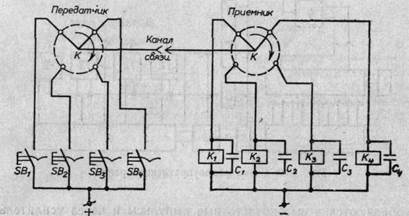
Рис. 16.1. Схема контактного распределителя сигналов
вида движения крановой установки, а неподвижные контакты приемной станции с обмотками реле Κ 1 ... Κ 4. При включении какой-либо кнопки на пульте управления и вращении контактов К происходит срабатывание одного или двух, трех, четырех реле, которые своими контактами производят подключение соответствующих пускателей двигателей. Для задержки команды до подачи следующего импульса параллельно обмоткам реле включены конденсаторы С 1 ... С 4 - Благодаря быстрому вращению подвижного контакта К замыкание линии происходит несколько раз в секунду и вследствие этого команды «подаются» беспрерывно. Особо следует отметить, что здесь по одному каналу связи можно передавать несколько команд дистанционного управления.
В последнее время все большее применение находит телеуправление кранами по радио с частотной модуляцией. Достоинство частотной модуляции состоит в высокой помехоустойчивости. Как правило, частотная модуляция используется в передатчиках в диапазоне 30... 200 Мгц.
Для усиления модулированных сигналов и подавления помех при радиоуправлении применяются супергетородинные приемники с детектором, который является источником и преобразователем вспомогательной частоты.
Структурная схема радиоуправления козловым краном (рис. 16.2) состоит из супергетородинного приемника и передатчика, настроенного на определенную частоту.
Импульсы от генератора 1 и команда с пульта 2 поступают на распределитель 3, а затем на радиопередатчик 4, где они
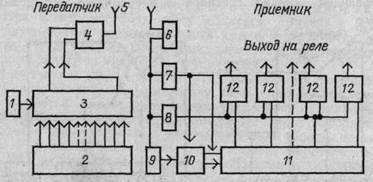
Рис. 16.2. Схема радиоуправления краном
преобразуются в высокочастотные импульсы и через усилитель поступают на антену 5.
Передача импульсов от генератора и командных с пульта управления 2 производится на двух частотах, отличающихся друг от друга. Эти импульсы на выходе 6 имеют различную полярность и разделяются в схемах 7, 8 и 9. Импульсы от генератора поступают на низкочастотную часть приемника 9, усиливаются и поступают в генератор 10, приемный распределитель 11 и каналы разделения 12. Откуда — уже на реле управления.
Радиоуправление козловыми кранами особенно эффективно производить оператором-строповщиком, который находится непосредственно у места штабелевки или погрузки.
Дистанционное управление кранами также можно производить на базе различных следящих систем.
Дата добавления: 2015-08-27; просмотров: 161 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ШТАБЕЛЕВОЧНО-ПОГРУЗОЧНЫХ МЕХАНИЗМОВ | | | АВТОМАТИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ ГРУЗОЗАХВАТНЫМИ МЕХАНИЗМАМИ. КОНТРОЛЬ ГРУЗОПОДЪЕМНОСТИ |