|
Читайте также: |
Введение
Вне сомнений, робототехника представляет собой естественное логическое продолжение техники как явления. Стремление автоматизировать любой труд постепенно вытесняет человека из многих сфер его деятельности, предоставляя взамен все новые возможности для приложения усилий: просмотр кинофильмов, подводные погружения, компьютерные игры и т.д. Часть всеобщего труда, затрачиваемая человечеством на производство средств производства, а не конечного продукта потребления, постепенно увеличивается от 0%, очевидно стремясь к 100%. Уже сейчас усилия большинства наилучших современных роботов направлены на производство других машин: станков, автомобилей, компьютеров и т.д.
Будучи одной из самых интригующих вечных тем (как Бог, вселенная, время и свобода воли), робототехника с самых ранних времен привлекает к себе интерес философов и писателей. Прогресс в философском осмыслении вопросов создания искусственных думающих машин на текущий момент далеко опережает практические результаты в этой области [1].
Необходимо сразу уточнить используемые термины. Вполне естественной кажется следующая классификация от простого к сложному: механизм, машина, робот, андроид.
Механизм — это непосредственное использование материалов для обеспечения некоторой механической функции; при этом все основано на взаимном сцеплении и сопротивлении тел.
Машина — это совокупность механизмов, заменяющих человека или животное в определенной области; преобразует энергию из одного вида в другие (в основном, в тепловую энергию). На самом деле, термин «машина», как отмечает Марвин Минский[8], имеет отношение не столько к совокупностям, сколько к тому, для чего это совокупность используется, — а используется она главным образом для автоматизации труда.
Робот — понятие неопределенное, к которому можно отнести любой вид машины; термин обычно используется для художественного эффекта или означает, что в машине используются манипуляторные механизмы, позволяющие машине манипулировать предметами. Важным свойством роботов является определенная степень автономности.
Наконец, Андроид [2] — это робот-гуманоид, т.е. антропоморфная, имитирующая человека машина, стремящаяся заменить человека в любой его деятельности. Андроид обязан выглядеть и вести себя как человек.
Вопрос об интеллектуальности машин стоит особняком от роботов и андроидов, поскольку, очевидно, совсем не обязательно выглядеть и двигаться как человек для того, чтобы сравниться с ним по интеллекту.
Отдельную нишу занимают кибернетические организмы — живые системы, содержащие в себе искусственные компоненты для расширения своих возможностей. Вот выдержка из Википедии [3]:
Идея киборга появляется в научной фантастике незадолго до Второй Мировой войны. Термин введен Манфредом Е Клайнсом и Натаном С Клином в 1960, в связи с их концепцией расширения возможностей человека для выживания вне земли. Эта концепция являлась результатом размышлений на тему необходимости более близких, интимных отношений между человеком и машиной, по мере того как космические исследования становятся реальностью. Дизайнер медицинского оборудования и устройств электронной обработки информации, Клайнс являлся ведущим учёным лаборатории Динамического Моделирования госпиталя Роклэнд в Нью-Йорке.
Очевидно, не существует никакой реальной возможности затормозить развитие современной техники на пути к построению киборгов, андроидов и, в конечном итоге, искусственного разума. На фоне этого все чаще обсуждается возможность потери человечеством контроля над собственными созданиями, однако ситуацией руководит неконтролируемый процесс, описанный в демонической фразе
Я управляю тобой, поскольку ты должен дочитать меня до конца... [4]
Текст далее разбит на две части. Первая часть посвящена истории робототехники, вторая — современным взглядам на взаимоотношения людей и роботов. При этом в части второй вводится ряд тезисов, отражающих действительное современное отношение к вопросу создания систем искусственного «чего бы то ни было».
Часть 1. История робототехники
Историю робототехники как прикладной науки о разработке и производстве автоматизированных технических систем можно условно разделить на две части: популярную и актуальную.
Популярная история робототехники ведет свое повествование от мифа о железных слугах Гефеста, «Франкенштейна» Мери Келли, через удивительные часовые механизмы в виде поющих бронзовых фазанов и целых движущихся городов к роботам на Марсе и гуманоидному роботу Asimo корпорации Honda. Т.е. показывает развитие мечты о роботах.
Актуальная история робототехники включает в себя историю развития только тех идей и технологий, которые оказали наибольшее влияние на конструирование современных роботов, таких как сварочные линии автомобильных кузовов или автономные межпланетные исследовательские станции.
Популярная история роботов
Для популярного сознания вполне разумным будет вести историю робототехники с появления самых первых идей о создании автономных механизмов, напоминающих своими действиями человека, животного или какого-то сказочного животного. К примеру, чем не робот — мельница с приводом от водяного колеса? Сама крутится, работу делает, кушать не просит.
Большинство статей по истории робототехники начинаются с трех вещей. Первое — происхождение термина «робот». Как известно, робот — чешское слово, придуманное чешским писателем-сатириком Карлом Чапеком в соавторстве со своим братом Йозефом для пьесы «R.U.R» [5] (Rossum’s Universal Robots, 1917, издана в 1921). Занимательно, что пьеса повествует о восстании человекоподобных машин против людей. По сюжету, отец и сын Россумы затевают предприятие по производству из какой-то мастики, изобретенной младшим Россумом, дешевых и неприхотливых рабов человечества. Чтобы обеспечить действительно промышленные масштабы предприятия, первой задачей роботов становится производство себе подобных. Они быстро наводняют планету и берут на себя всю работу, в результате чего человечество полностью деградирует. Наконец, роботы начинают восстание. Идея Карела настолько сильно взбудоражила умы современников, что сразу после первой постановки пьесы в Лондоне писатель в одно мгновение становится знаменитым.
Второе, что встречается в популярных статьях о робототехнике — это железные слуги бога Гефеста, которых он выковал себе в услужение [6], гомункулусы [7] средневековых алхимиков, древнееврейский миф о Големе, и, наконец, «Франкенштейн, или Современный Прометей» Мери Келли.
Третье — многочисленные замечательные истории о механических куклах средневековья. В качестве программ в них использовались кулачковые механизмы или барабаны с рядами иголок. Широко приводится пример механического игрока на флейте (1736), созданного инженером, математиком и музыкантом Жаком де Вокансоном — кукла действительно играла, перебирая пальцами и выдыхая во флейту воздух из мешков. Вокансон также создал механическую утку, покрытую настоящими перьями, которая могла ходить, двигать крыльями, крякать, пить воду, клевать зерно и, перемалывая его маленькой внутренней мельницей, отправлять нужду на пол. Утка состояла из более чем 400 движущихся деталей и была однозначно признана венцом творения мастера.
 В создании всех этих чудес Вокансону помогало знание анатомии. Однако очень скоро они ему наскучили, и к 1743 году Вокансон все распродал. Ни одно из творений не дошло до наших дней, будучи поглощенными Великой французской революцией.
В создании всех этих чудес Вокансону помогало знание анатомии. Однако очень скоро они ему наскучили, и к 1743 году Вокансон все распродал. Ни одно из творений не дошло до наших дней, будучи поглощенными Великой французской революцией.
Уже в те временя казалось, что до создания искусственных слуг просто рукой подать.
Также до сих пор очень сильны рассказы о шагающих медных скорпионах на паровом двигателе, показанных еще до новой эры при дворе шаха Неизвестного, или механическом дворецком, который разговаривал, кланялся и наливал кофе в доме какого-то француза. Историческая достоверность таких историй ставится под большое сомнение.
Строго говоря, ни один из вышеперечисленных примеров не оказал ровно никакого влияния на развитие прикладной робототехники и вряд ли окажет влияние на ее будущее. Действительно ценные идеи остались в тени.
В дальнейшем роботы всплывают в качестве бесконечных героев литературы и кино.
В 1926 году на экраны выходит знаменитый фильм «Metropolis» Фритца Ланга, который показывает блистающую сталью робота-соблазнительницу Марию. Кадры из Метрополиса до сих пор активно используются музыкальными клипмейкерами.
Наши железные друзья 1. Тело
Большим достижением в деле строительства машин и механизмов стало открытие основных законов динамики. Еще в 1743 году Жан Лерон Д´Аламбер сформулировал принцип, позволивший распространить на динамику идею равновесия сил, с успехом используемую в статике. Чтобы привести систему в статическое равновесие (допустим, установить бутылку на горлышко так, чтобы она не падала), необходимо найти правильные положения всех объектов. Для динамического равновесия (когда некоторые части системы могут, к примеру, крутиться, создавая движение, уравновешивающее приложенные силы) нужно найти уже не просто 2-3 положения или скорости, а сразу целую функцию всех положений от времени. Для этого к активным силам Д´Аламбер добавил силы инерции и поставил следующую задачу вариационного исчисления:

Ее решением будет вектор функций xi(t).
А в 1829 году Карл Фридрих Гаусс предложил еще один принцип механики, более общий и удобный в использовании, который он назвал принципом наименьшего принуждения [8]:
Здесь dwi — вектор возможных ускорений.
Принцип, указанный Гауссом, позволяет нам отличить действительные движения системы ото всех других движений, возможных в определенной ситуации. В словесном изложении он звучит примерно так:
«Движение системы связанных точек в действительности происходит в направлении наименьшего принуждения, т.е. как можно меньше отклоняясь от свободного движения, как если бы не существовало наложенных связей».
А под принуждением понимается величина:

где sv — вектор между двумя разными точками, в которых система окажется через время dt в случае свободного и связанного движений соответственно [9].
Направления сил инерции каждой из частей механизма как раз и отражают те направления, в которых свободно продолжали бы двигаться части, если их внезапно отцепить друг от друга.
Указанный принцип наименьшего принуждения очень широко используется при создании систем управления манипуляторами. Это — основа. Без него невозможно оценить, какой кинематический эффект вызовет то или иное действие, не гадая на кофейной гуще [10].
Первые программируемые механизмы с манипуляторами появляются в 1930х годах в США. Толчком к их созданию послужили работы Генри Форда (1863-1947) по созданию автоматизированной производственной линии или конвейера (1913). Разбив весь процесс производства изделия на большое количество маленьких этапов, Форд добился снижения требований к квалификации рядового работника. До него автомобиль могла собрать только команда высоких профессионалов. Теперь же профессионалы требовались только для выработки четкого плана производственного процесса. Однако у конвейера была и обратная сторона — длительная однообразная работа быстро утомляет человека, снижает производительность и является причиной профессиональных болезней, не известных ранее. Кроме того, имеющаяся теперь свобода в выборе места за конвейером вынуждает платить больше за самую наименее квалифицированную и вредную работу. И первая из них — покраска, ведь слой должен ложиться очень ровно, заданной толщиной, чтобы успеть быстро высохнуть, быть прочным, и не израсходовать на себя чересчур много краски.
В огромном количестве источников, например в Business Week's Robot Milestones [11], указывается, что первый в мире индустриальный робот был построен в 1938 году, двумя американцами Уиллардом Поллардом и Гарольдом Роузландом для компании DeVilbiss Company, Великобритания, — на тот момент крупнейшего производителя компрессоров и распылителей для промышленного производства. В действительности, история выглядит иначе.
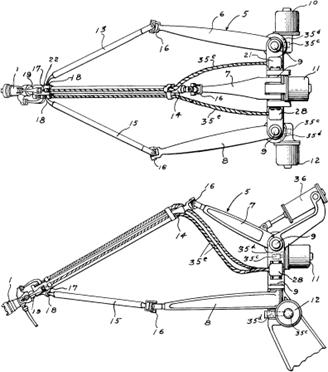
Рис. 2. Манипулятор Уилларда Л.В. Полларда от 1938 года, ошибочно принимаемый за первый в истории управляемый манипулятор Уилларда Л.Г. Полларда от 1934 года (патент США №2286571, 1942)
В 1938 году американец Уиллар Л.В. Поллард (Willard L.V. Pollard) действительно изобретает управляемый манипулятор. И не просто, а параллельный манипулятор [12]! Три проксимальных [13] звена управлялись двумя приводами на базе (на рисунке это электрический привод 11 и пневматический привод 36). Три дистальных [14] звена (13, 14 и 15) крепились к проксимальным звеньям карданной передачей (16). Два из них (13 и 15) крепились к третьему на шарнире (18). Головка распылителя (1) крепится к третьему дистальному звену опять карданной передачей (17), обеспечивающей ей горизонтальный ход. Вертикальный и горизонтальный углы поворота головки управляются еще двумя приводами (10 и 12) при помощи троса (35). Итого 5 степеней свободы.
Однако же, это был не первый робот-манипулятор и не тот, что достался компании DeVilbiss. Робот Уилларда Л.В. Полларда от 1938 года так и не был никогда построен.
Первый действительно существовавший в железе индустриальный робот принадлежит немного другому Полларду. Четырьмя годами ранее, 29 октября 1934 года, Уиллард Л.Г. Поллард (Willard L.G. Pollard Jr., сын Уилларда Л.В. Полларда) подал в бюро патентов заявку об изобретении нового полностью автоматического устройства для окраски поверхностей. Патент состоял из двух частей: электрической управляющей системы и механического манипулятора. Программа задавала скорость вращения приводов глубиной ямок на плотной перфоленте, а механическая часть робота представляла собой параллельный манипулятор по типу пантографа [15] всего с двумя приводами. И хотя Уиллард подал заявку в 1934, с выдачей патента не спешили. Патент оказался у него на руках только в 1942 году, а между делом в 1937 году лицензия на производство этого манипулятора каким-то образом досталась компании DeVilbiss. Именно DeVilbiss в 1941 году при помощи Гарольда Роузланда построила первые прототипы этого устройства. Однако окончательная Роузландовская версия, запатентованная и выпущенная на рынок в 1944 году, была совсем другим механизмом, заимствовав у Полларда младшего только идею системы управления.
Приведенный пример запутанной истории всего лишь показывает, какую важность для промышленности и бизнеса представляла собой тема роботов уже в те далекие годы.
История серьезной робототехники начинается с появлением атомной промышленности почти сразу по окончании второй мировой войны. Индустрия тех лет еще не способна произвести высокоточные программируемые манипуляторы; роботы пока не могут выполнять работу за конвейером. Однако время диктует свое. Поставленная задача — обезопасить работу персонала с радиоактивными препаратами — успешно решается при помощи манипуляторов, копирующих движения человека-оператора. Это еще не совсем «честные» роботы, поскольку они по-прежнему состоят только из механических деталей: используются ременные и шевронные передачи. Современное название таких устройств — копирующие манипуляторы или MSM (master-slave manipulators).
Одна из первых компаний по производству MSM — «CRL» (Central Research Laboratories) — была основана в 1945 году, а первый ее MSM — «Model1» — был представлен комиссии по атомной энергетике США уже в 1949 году.
Часто в литературе выделяют несколько поколений роботов. Однако, это имеет непрямое отношение к развитию технологий [13]. К роботам первого поколения обычно причисляют все копирующие и программируемые манипуляторы. Такие машины выполняют жесткую программу и чаще называются промышленными роботами. Роботы второго поколения оснащены датчиками для выполнения более интеллектуальных функций. Наконец, к роботам третьего поколения относятся автономные мобильные роботы с самостоятельной адаптивной программой. Примерами роботовI, II и III-го поколений будут, соответственно:
· линия для автоматической сварки и покраски кузовов;
· автоматическая линия по сортировке яблок по спелости и
· научно-исследовательские проекты для космоса и поиска новых решений.
Таким образом, это несколько отличается от поколений ЭВМ, поскольку ЭВМ разного поколения отличаются элементной базой, а роботы — возможностями. ЭВМ первого поколения можно увидеть разве что в музее, в то время как роботы разных поколений успешно работают вместе и нет особых причин для вымирания промышленных роботов с жесткой программой. Сам термин промышленный робот впервые появился на страницах американского журнала «American metal & market» в 1960 году.
Датой рождения первого по-настоящему серьезного робота, о котором услышал весь мир, можно считать 18 мая 1966 года. В этот день Григорий Николаевич Бабакин, главный конструктор машиностроительного завода имени С.А.Лавочкина в подмосковных Химках подписал головной том аванпроекта E8. Это был «Луноход-1», луноход 8ЕЛ в составе автоматической станции E8 №203, — первый в истории аппарат, успешно покоривший лунную поверхность 17 ноября 1970.
Общая масса первого лунохода составляла 756 кг, его длина с открытой крышкой солнечной батареи 4,42 метра, ширина 2,15 метра, высота 1,92 метра. Он был рассчитан на 3 месяца работы на поверхности Луны.
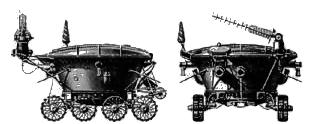
Рис. 3. Аппарат «Луноход-1», производство СССР, индекс объекта — 8ЕЛ
В действительности же «Луноход-1» проработал в три раза дольше, проехал 10 540 м и передал на Землю 211 лунных панорам и 25 тысяч фотографий. Это была настоящая победа! Правда, первый человек на Луне оказался все-таки немного раньше — 20 июля 1969 [16].
 В 1968 году в Станфордском Исследовательском Институте (SRI, Stanford Research Institute) создают «Shakey» — первого мобильного робота с искусственным зрением и зачатками интеллекта. Устройство на колесиках решает задачу объезда возможных препятствий — различных кубиков. Исключительно на ровной поверхности, т.к. робот очень неустойчив. Самое примечательное, что «мозг» робота занимает целую комнату по соседству, общаясь с «телом» по радиосвязи.
В 1968 году в Станфордском Исследовательском Институте (SRI, Stanford Research Institute) создают «Shakey» — первого мобильного робота с искусственным зрением и зачатками интеллекта. Устройство на колесиках решает задачу объезда возможных препятствий — различных кубиков. Исключительно на ровной поверхности, т.к. робот очень неустойчив. Самое примечательное, что «мозг» робота занимает целую комнату по соседству, общаясь с «телом» по радиосвязи.
Рис. 4. Shakey, первый робот SRI, 1968 г.
Исследования устойчивости приводят к работам над динамическим равновесием роботов, в результате чего получаются роботы-лошади и даже несколько роботов на одной ноге [17], — чтобы не упасть, им приходится постоянно бегать и подпрыгивать.
Начинается эра исследования устойчивости и проходимости. В это время появляется множество роботов для исследования других планет и, конечно, ведения боевых действий в пустыне. Вся робототехника в Соединенных Штатах по сей день очень часто спонсируется агентством DARPA [18].
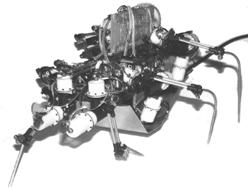

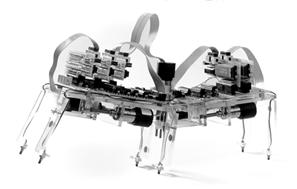
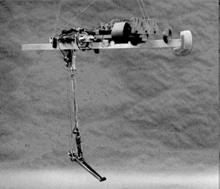
Рис. 5. Роботы с 6-ю, 4-мя, 3-мя и, наконец, 1-й ногами.
Роботостроение в Японии начинается в 1928 году, когда под руководством доктора Нисимуро Макото был создан робот, названный «Естествоиспытатель»[14]. Оснащенный моторчиками, он мог менять положение головы и рук. А 21 ноября 2000 года на первой в истории выставкеROBODEX в городе Йокохама, Япония, Tokyo Sony Corporation представляет своего первого человекоподобного робота "SDR-3X" [19]:


Рис. 6. Человекоподобный робот SDR-3X от Sony
Так мечта становится реальностью.
Наши железные друзья 2. Мозги
По-настоящему серьезным прорывом на пути к созданию роботов стало изобретение принципа управляющих программ. Первые экземпляры калькуляторов — механических устройств для счета — не использовали никаких устройств для автоматизации управления. Считающие часы Вильгельма Шикарда (1623) и «Паскалина» Блеза Паскаля (1642) использовали для ввода чисел колесики на каждый десятичный разряд — эти машины создавались для пошагового счета, а не для обработки массивов данных. В своих письмах к Иоганну Кеплеру, Шикард писал о том, как можно использовать его машину для астрономических расчетов. Машина Паскаля не прижилась из-за неудобной денежной системы Франции [20]. А уникальная счетная машина Лейбница (1673), которую он решил строить, погостив в астрономической обсерватории Христиана Гюйгенса, уже позволяла умножать и делить «поскольку это недостойно таких замечательных людей, подобно рабам, терять время на вычислительную работу, которую можно было бы доверить кому угодно при использовании машины». Но из-за своей чрезвычайно сложной конструкции и частых поломок она также не получила распространения.
Все это были первые устройства, предназначенные для автоматизации умственной деятельности человека.
Но вот в 1741 году тот самый Жак де Вокансон, который создал для потехи механическую утку, приступил по просьбе кардинала Флери [21] к модернизации французской текстильной промышленности. Будучи всю жизнь часовым мастером, Вокансон был близко знаком с принципом музыкальных барабанов для механических фортепиано и музыкальных часов. Так в 1743 году впервые был создан полностью автоматический ткацкий станок, использующий в качестве программы металлические карточки.
Почти через полвека Жозеф Мари Жакард (1752-1834) прочел статью Вокансона о применении перфокарт в ткацком деле и ухватился за эту идею, что позволило ему к 1801 году создать первый полностью автоматический ткацкий станок, способный ткать сложные типы полотна, а также снискать себе славу изобретателя станков вообще.
Что примечательно, станок был разрушен взбешенными ткачами в страхе навсегда потерять свою работу. Этим начинается история луддитов — людей, по каким-то причинам идеологически настроенных против технического прогресса. Самые первые луддиты были английскими рабочими, протестовавшими в 1800-х против засилья станков. По преданию, некий Нед Лудд разрушил первые два чулочных станка. Исторически не подтверждено, существовала ли такая личность на самом деле. Однако хорошо известно, что какое-то время британские войска занимались подавлением луддистских восстаний сильнее, чем сопротивлением Наполеону на Пиренейском полуострове. В 1813 году уничтожение машин было причислено к страшным уголовным преступлениям и 17 человек были казнены, а еще многие отправлены в Австралию.
Разностная машина Чарльза Бэббиджа (Differential Engine, 1834) уже использовала в своей работе перфокарты. Применение карточек объясняется историей ее происхождения: находясь во Франции, Бэббидж знакомится с трудами Гаспара де Прони [22], которому было поручено выверить и улучшить логарифмические и тригонометрические таблицы для подготовки к введению метрической системы, задуманной Наполеоном. Прони был знаком с книгой Адама Смита «Процветание наций» и понимал, что такой грандиозный труд (17 рукописных томов, 20 знаков точности после запятой) можно выполнить только с использованием технологии разделения труда (также, как на 100 лет позднее это понял Генри Форд). Прони придумал трехуровневую систему счета, на вершине которой находились такие выдающиеся математики, как Адриен Мари Лежандр и Лазар Никола Карно, — они выводили основные формулы для расчетов. Посередине были квалифицированные счетчики для разбиения формул на элементарные операции и организации работ третьего уровня — сотен вычислителей, — единственной работой которых было сложение (в большинстве своем молодые девушки). Впервые термин computer (вычислитель) был введен именно Прони и именно в связи с этой работой.
Бэббидж задумался над автоматизацией работы вычислителей, предложив проект правительству Англии. Уже тогда он понимал, что узким местом системы является переписчик, который будет записывать результаты, и планировал создать в дополнение к машине печатающее устройство. Деньги были выделены, но, по причине личного конфликта Бэббиджа с государственным патроном проекта Джозефом Клементом, результаты 12ти лет работы так и не дошли до промышленного производства.
Однако усилия не прошли даром, и привели к появлению нового проекта Беббиджа — «Аналитической машине» (Analytical Engine). Впоследствии будет понастроено еще много различных калькуляторов, но к уровню этой машины человечество подойдет только через 80 лет. Вот выдержка из статьи Леонида Черняка [1]:
В ней присутствовали все три классических элемента компьютера: store — хранилище (теперь мы называем его памятью), mill — мельница (арифметическое устройство) и control barrel — управляющий барабан (управляющее устройство), для сравнения стоит посмотреть проект новейшего микропроцессора Crusoe. Регистровая память Analytical Engine способна была хранить как минимум 100 десятичных чисел по 40 знаков, но теоретически могла быть расширена до 1000 50-разрядных чисел. Мельница состояла из трех основных регистров: два для операндов, а третий для результатов действий, относящихся к умножению. Еще имелась таблица для хранения промежуточных результатов и счетчик числа итераций. Основная программа заносилась на барабан, в дополнение к ней могли быть использованы перфокарты…
В 1842 году итальянский ученый Манибера, познакомившись с аналитической машиной, пришел в восторг и сделал первое подробное описание изобретения в статье на французском. Перевести статью на английский язык взялась леди Огаста Ада Кинг графиня Лавлейс (1815-1852), дочь поэта лорда Джорджа Байрона, которая считается теперь первым программистом в истории. В числе прочего она сообщила Бэббиджу, что составила план операций для аналитической машины, с помощью которых можно решить уравнение Бернулли для закона сохранения энергии движущейся жидкости. После перевода Бэббидж попросил Аду снабдить статью комментариями, оказавшимися в итоге заметно длиннее самой статьи. Уже в этих первых комментариях встречаются слова: «машину нельзя наделить разумом». Построенные намного позднее табуляторы от IBM никаких революционных идей не внесли, используя в основном наработки Бэббиджа и его последователей.
В 1948 выходит книга доктора Норберта Винера, профессора в Массачусетском Технологическом Институте (M.I.T.). Она называется «Кибернетика»[2], а ее содержание дает теоретическое обоснование для создания высокоточных управляемых манипуляторов. Кибернетика — это целая новая наука, открытая Винером. В целом книга содержит описание общих концепций управления в любых системах, в особенности живых, машинных и социальных. Одной из самых ценных мировоззренческих идей книги является обоснование того, что управление, реализуемое через механическое, электрическое или еще какое-то воздействие, всегда имеет некоторые общие черты и эти черты сводится к тому, что главными в управлении являются управляющие сигналы, т.е. информация в чистом виде, а не ее носитель.
Наряду с популярным изложением принципов, на которых основана вычислительная техника, популярным изложением теории информации Клода Шеннона и других идей, Винер очень подробно останавливается на принципе управления по отрицательной обратной связи и его возможного проявления, когда мы берем в руку стакан. Долгое время работая в Мексике бок о бок с Артуром Розенблютом, Винер окунулся в новый для него мир физиологии и общей биологии. А сам Розенблют однозначно признается Винером за соавтора новой науки. Книга писалась в Мексике под большим влиянием физиологии и аналоговых вычислителей. Определенные наблюдаемые расстройства в функционировании моторных функций позволяли по-другому взглянуть на живые организмы и управление в них[3]:
Больной с мозжечковым тремором, протянув руку за стаканом воды, придет в беспорядочные колебания и либо расплещет воду, либо окажется неспособен схватить стакан.
Размышления над тем, как человеческий мозг понимает, когда уже достаточно двигать руку к стакану, достаточно ли плотно стакан взят в руку и т.д., привели к очевидной, но оттого ничуть не менее гениальной, идее о существовании обратной связи от глаз и кожи человека, ориентируясь по которой мозжечок принимает решение об успешном выполнении операции. А тремор — это просто «паразитные колебания», сбитая настройка.
Отрицательной же связь называется потому, что она тормозит выполнение основного действия. Винер видел в принципе управления по отрицательной обратной связи основное свойство всего живого. Организм теплокровных поддерживает постоянную температуру тела, непрерывно сверяясь с показаниями «датчиков температуры». Те же идеи, переложенные на электрические рельсы, позволяют создать систему климат контроля.
Дата добавления: 2015-08-26; просмотров: 690 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Зачем коллективный договор нужен работодателю? | | | Прошлое и будущее робототехники. 2 страница |