Читайте также:
|
Действительно, до измерения датчиком параметра х у потребителя не было информации об объекте — область неопределенности простиралась на весь диапазон измерения от 0 до ∞. После измерения часть информации об объекте Iи становится доступной потребителю. Потеря полезной информации при измерении ∆I = I — Iи определяется информационным КПД η I датчика. Чем меньше ∆l, тем уже интервал ∆x, в котором находится действительное значение измеряемого параметра. В результате измерения определяется некоторое (номинальное) значение этого параметра, расположенное внутри данного интервала. Следовательно, область неопределенности сужается от полной длины шкалы до длины интервала Δх. Отрезки длиной n∆x (где п — целое число, п = 1,2,..., N) образуют шкалу измерений, или эталон.
Основной функцией любого датчика является измерение. В теории информации этот процесс трактуется как устранение некоторой части неопределенности в системе измеритель — измеряемый параметр, а количество информации определяется как разность неопределенностей до и после проведения измерения.
Измерением называется процесс приема и преобразования информации об измеряемом параметре в целях его количественного сравнения с принятой шкалой или эталоном. (Заметим, что в такой постановке измерение — частный случай распознавания.)
Точность датчика зависит от величины потери полезной информации ΔI в процессе преобразования. В метрологии ΔI оценивают косвенно, т. е.
через отклонение результата измерения у от реального (истинного) ур значения измеряемого параметра: ∆y = |у-ур|. Истинное значение остается неизвестным и на практике его определяют приближенно через значение, полученное датчиком, и полосу погрешностей ∆y:

|
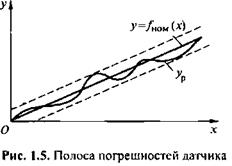 Всякий датчик обладает реальной и номинальной функциями преобразования. Реальная функция преобразования является полной характеристикой датчика и сложной функцией измеряемого параметра; ее вид зависит от множества влияющих факторов. Номинальная функция преобразования — это функция, приписываемая датчику и приближенно выражающая зависимость информативного параметра на выходе от значений измеряемого параметра. Номинальная функция преобразования всегда одна и та же, в то время как реальная является случайной величиной, допускающей множество частных реализаций в зависимости от внешних условий.
Всякий датчик обладает реальной и номинальной функциями преобразования. Реальная функция преобразования является полной характеристикой датчика и сложной функцией измеряемого параметра; ее вид зависит от множества влияющих факторов. Номинальная функция преобразования — это функция, приписываемая датчику и приближенно выражающая зависимость информативного параметра на выходе от значений измеряемого параметра. Номинальная функция преобразования всегда одна и та же, в то время как реальная является случайной величиной, допускающей множество частных реализаций в зависимости от внешних условий.
Объективное свойство измерителя, связанное с различием реальной и номинальной функций преобразования, называется погрешностью. Погрешность проявляется в процессе измерения; она численно равна разности между измеренным значением некоторой величины и ее истинным значением, которое неизвестно, так как неизвестна реальная функция преобразования. Поскольку реальная функция преобразования является случайной
функцией измеряемой величины, все ее возможные реализации попадают в некоторую область относительно номинальной функции преобразования, называемую полосой погрешностей (рис. 1.5).
Следует различать погрешность собственно датчика и погрешность эксперимента, обусловленную несовершенством выбранного метода измерения. Поэтому основным требованием к эксперименту является необходимость обеспечения именно методической погрешности, которая должна быть меньше погрешности непосредственно измерительного устройства. На практике считают, что основная часть погрешности измерения связана с датчиком.
Для построения функции преобразования, а также определения ее отклонения от линейности проводят градуировку датчика. Методов градуировки несколько. Одним из наиболее распространенных является метод сравнительной, или косвенной, градуировки. В этом случае в процессе испытания используют образцовый (эталонный) датчик с известной градуировочной характеристикой.
В метрологии рассматривают несколько десятков различных погрешностей. Выбор тех из них, которые в итоге войдут в паспорт информационного устройства, зависит от назначения, режима эксплуатации и целого ряда специальных требований.
Проводя классификацию погрешностей, ограничимся лишь теми признаками, которые учитывают специфику функционирования робототехнических систем. Таких признаков всего четыре. Ниже для каждого из них приведены основные типы погрешностей:
1) по способу выражения — абсолютные, относительные и приведенные;
2) по связи с функцией преобразования — аддитивные (погрешности нуля) и мультипликативные (погрешности чувствительности);
3) по характеру проявления — систематические, случайные и прогрессирующие;
4) по способу оценки — основные и дополнительные.
Рассмотрим их подробнее в соответствии с ГОСТ 16263—70. Абсолютная погрешность — это разность между показанием датчика и истинным значением измеряемого параметра х. Различают абсолютную погрешность датчика по входу ∆x и выходу ∆y:

|
где xном,.yном— номинальные (приблизительные) значения измеряемого параметра на входе и выходе датчика соответственно.
Абсолютная погрешность является неэффективной оценкой точности, потому что имеет различную размерность по входу и выходу и зависит от значения измеряемого параметра. Более объективной оценкой точности датчика является относительная погрешность, но и она является функцией измеряемого параметра х.
Относительная погрешность датчика по входу и выходу равна соответственно

 Наиболее эффективной оценкой точности датчика является его приведенная погрешность:
Наиболее эффективной оценкой точности датчика является его приведенная погрешность:
где ∆xmax, ∆ymax— максимальные абсолютные погрешности датчика по входу и выходу; xlim — верхний предел диапазона измерения входной величины х; xlim =ƒ(xlim).
Для датчика с линейной номинальной функцией преобразования

где Кном — номинальный коэффициент преобразования.
Аддитивной (от англ. add) называется составляющая полной погрешности датчика, не зависящая от измеряемого параметра х. Функция преобразования в этом случае имеет вид (рис. 1.6, я)

где ∆0x— аддитивная погрешность датчика по входу.
Относительные аддитивные погрешности датчика по входу и выходу одинаковы. При измерении малых сигналов, когда х→∆0x, εx. → 100%, поэтому аддитивная погрешность определяет порог чувствительности или разрешающую способность датчика.

|
Мультипликативной (от англ. multiplicate) называется составляющая полной погрешности; абсолютная величина которой пропорциональна измеряемому параметру х. Тогда для функции преобразования датчика (рис. 1.6, б) справедливо выражение

|
где εк=∆К/Кном — относительное изменение коэффициента преобразования;
∆К = К - К НОМ ≈ ∆у/∆х. При х = xlim получаем ∆К = ∆ylim/∆xlim.
В общем случае относительные мультипликативные погрешности по входу и выходу не совпадают, однако при малых их полагают равными.
Функция преобразования датчика при наличии аддитивной и мультипликативной погрешностей описывается выражением вида

|
Систематической называется погрешность, имеющая детерминированную функциональную связь с вызывающим ее источником, при этом как сама функция, так и ее аргумент известны. Систематическую погрешность можно определить по расхождению между наиболее вероятными значениями измеряемого параметра при использовании различных методик и аппаратуры.
Систематическими являются: погрешность значения опорной величины (например, связанная с изменением уровня напряжения питания мостовой схемы); погрешность, зависящая от условий применения датчика (в частности, скорость реакции термозонда зависит от того, в покоящуюся или движущуюся жидкость он помещен); погрешность, обусловленная неточностью модели датчика или упрощением методики эксперимента (например, вы-
званная нелинейностью моста Уитстона, самонагревом термометрического сопротивления, теплопроводностью корпуса датчика). Две последние могут быть отнесены к методической погрешности.
Прогрессирующей называется погрешность, значение которой медленно изменяется с течением времени (например, погрешность чувствительности или градуировочной кривой, обусловленная старением).
Случайной является погрешность, появление которой происходит со случайной амплитудой и фазой. Причины ее возникновения могут быть ясны, однако значение в момент измерений неизвестно. Случайными, в частности, являются «паразитные» погрешности (например, тепловые шумы, электромагнитные наводки, флуктуации напряжения питания); погрешности, вызванные влияющими факторами, если период воздействия их существенно меньше периода измерения (например, температурная погрешность будет случайной, если измерения проводят в течение нескольких дней, и систематической, если на протяжении нескольких минут); погрешность, связанная с собственными параметрами датчика, например порогом чувствительности (для потенциометрического реостатного датчика она проявляется в отсутствии сигнала при перемещении движка на расстояние, меньшее чем между соседними витками), гистерезисом, дискретностью аналого- цифрового преобразователя (АЦП), а также погрешность считывания, зависящая от применяемой аппаратуры (например, толщины стрелки прибора) и квалификации оператора.
Погрешность разрешения εр определяет минимальное значение измеряемого параметра, регистрируемое данным прибором:.

где εп, εсч— соответственно погрешность порога чувствительности и считывания.
Точность любого датчика зависит от условий его применения. Так, в некоторых случаях при измерении одного и того же параметра регистрируемые значения могут отличаться в десятки раз. Поэтому все погрешности.в зависимости от условий применения датчика подразделяют на две группы: основные — обусловленные конструктивно-технологическими факторами, и дополнительные — вызванные воздействием окружающей среды.
Основной погрешностью называется составляющая полной погрешности датчика, которая определяется в нормальных условиях его функционирования (эти условия указаны в паспорте датчика). Дополнительная погрешность — это составляющая полной погрешности датчика, возникающая при отклонении значения одного из влияющих факторов (температуры, влажности и др.) от его значения при нормальных условиях. Для датчиков, работающих в условиях воздействия механических и климатических факторов, дополнительная погрешность обычно намного превышает основную. Поэтому в паспорте на датчик могут быть не приведены нормальные условия эксплуатации, а лишь указаны граничные значения влияющих факторов, удовлетворяющие заданной погрешности, — так называемые рабочие условия.
Дата добавления: 2015-08-26; просмотров: 229 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Датчики и их характеристики | | | Способы компенсации и учета погрешности |