Читайте также:
|
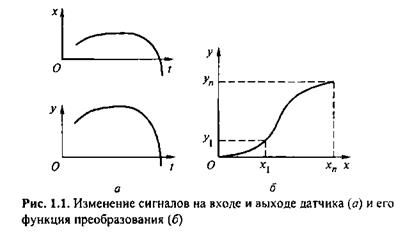
Датчик (измерительный преобразователь) — это устройство, обеспечивающее функциональное преобразование одной величины в другую величину, участвующую в некотором информационном процессе. Рассматривая физические процессы в преобразователях, можно установить связь между выходным у и входным x сигналами (рис. 1.1, а), изменяющимися во времени:

|
Математическое (или графическое) описание этой связи называется функцией преобразования датчика (рис. 1.1, б). В большинстве случаев информационные характеристики датчиков, в том числе их функцию преобразования, определяют на основании анализа преобразования сигналов в системе.
Для датчиков с линейной функцией преобразования используют коэффициент преобразования:

|
где xi,уj— текущие значения x и у.
|
В зависимости от числа измеряемых параметров датчик характеризуется одномерной или векторной функцией преобразования (например, однокомпонентный датчик силы и силомоментный датчик). Датчик, имеющий векторную функцию преобразования
Y = F(Х), является многокомпонентным.
В принципе любой датчик можно считать многокомпонентным, поскольку на него кроме измеряемой величины действуют факторы, обусловленные внешними причинами. Тем не менее под многокомпонентным датчиком будем понимать только такой преобразователь, который конструктивно предназначен для измерения нескольких параметров. Особенностью многокомпонентного датчика является взаимное влияние каналов измерений. Для оценки этого свойства измерителя используют понятие «избирательность канала».
Пусть на входах n-канальной измерительной системы действует сигнал вызывающий некоторые сигналы на всех выходах системы. Тогда избирательностью к-го канала измерительной системы называется выражение вида

|
где ук — сигнал на выходе k-го канала системы.
Для линейных систем избирательность характеризуется коэффициентом
влияния Ʌij каналов:

|
где уi, уj— сигналы на выходах i-го j-го каналов; хj — входное воздействие на у-й канал. В частном случае при отсутствии влияния каналов Ʌij = 0 и уi - 0, т. е. на выходе канала образуется сигнал, пропорциональный только измеряемой величине.
Если функции изменения во времени сигналов на входе и выходе дифференцируемы, то чувствительность датчика S = dy/dx. Чувствительность — важнейшая характеристика датчика, позволяющая оценить выходной сигнал по пределам изменения измеряемой величины и выбрать датчик, отвечающий требованиям измерения. Для линейных преобразователей S = К и у = Кх = Sx, причем единицы измерения К и S одинаковы, например вольт на ньютон (В/Н). В общем случае чувствительность зависит от внешних факторов: напряжения питания, температуры, а также спектра и частоты измеряемого воздействия. Например, в паспорте на дифференциальный трансформатор TION фирмы Ifelec (Франция) указывается его чувствительность S1 = 1,5 мВ/мм при частоте напряжения питания 50 Гц и S2= 17 мВ/мм при 400 Гц.
Чувствительность датчиков определяют в статическом и динамическом режимах работы. Статическую чувствительность датчика Sc измеряют на основании его статической функции преобразования, причем Sc = К и совпадает с S в том случае, если эта функция является прямой, проходящей через начало координат.
Динамическую чувствительность SД можно определить лишь в случае, когда измеряемая величина х является периодической функцией и выходной сигнал у имеет ту же периодичность, что и х. Например, если x(t) = x0 + x1cos ωt, то y(t) = у0 + y1 cos(ωt + ψ), где ω — круговая частота, ω= 2πƒ; ƒ— частота входного сигнала, Гц.
Обычно измеряемый сигнал не является гармонической функцией и сложным образом изменяется во времени. Если функцию x(t) разложить в ряд Фурье, то выходной сигнал у(t) будет представлять собой суперпозицию различных составляющих yn(t):

|
Здесь у0 — координата, определяющая рабочую точку на статической градуировочной характеристике; ψ — сдвиг фаз между сигналами на входе и выходе.
Зависимость динамической чувствительности от частоты ƒ представляет собой частотную характеристику датчика. Функция Sa (ƒ) зависит от
механической, тепловой и электрической инерции преобразователя, т. е. его массы т, электрического сопротивления R, индуктивности L и емкости С. Частотные характеристики датчика определяются порядком дифференциального уравнения, описывающего его конструктивную схему. В соответствии с этим выделяют датчики первого и второго порядка.
 Датчики первого порядка в своей структуре не содержат колеблющихся частей. К ним относятся, например, оптические преобразователи — свето- и фотодиоды. Функция преобразования датчика первого порядка описывается дифференциальным уравнением первого порядка
Датчики первого порядка в своей структуре не содержат колеблющихся частей. К ним относятся, например, оптические преобразователи — свето- и фотодиоды. Функция преобразования датчика первого порядка описывается дифференциальным уравнением первого порядка
где А и B – константы. В комплексной форме

и функция преобразования датчика первого порядка принимает вид

Где x1,y1 – действительные величины. Представляя граничную частоту в виде

 , а сдвиг фазы как
, а сдвиг фазы как
ваываываывввв
,получаем

Таким образом, частотная характеристика датчика первого порядка определяется зависимостью

 ,или
,или
где S(0) = 1/В. В частном случае при ƒ <<ƒг S(ƒ) = S(0). Вид амплитудно- частотных (АЧХ) и фазочастотных характеристик (ФЧХ) представлен на рис. 1.2, а.
 Датчики второго порядка (например, пьезоэлектрические акселерометры) содержат в своей структуре колеблющиеся элементы и характеризуются собственной частотой ƒ0 и коэффициентом затухания ζ. Функция преобразования датчика представляет собой дифференциальное уравнение вида
Датчики второго порядка (например, пьезоэлектрические акселерометры) содержат в своей структуре колеблющиеся элементы и характеризуются собственной частотой ƒ0 и коэффициентом затухания ζ. Функция преобразования датчика представляет собой дифференциальное уравнение вида
а частотная характеристика определяется зависимостью


Принято считать, что оптимальное значение коэффициента затухания ζ лежит в пределах 0,6...0,7. Частотные характеристики датчика второго порядка представлены на рис. 1.2, 6

Полоса пропускания В датчика — это диапазон частот, в котором ординаты АЧХ уменьшаются относительно их максимального значения не более чем н а 3 дБ. В расчетах можно считать, что полоса пропускания соответствует горизонтальному участку АЧХ. Для датчиков первого порядка имеем 20 lg S(ƒr)/S(0)= 3 дБ, т. е. В=ƒг. Ширина полосы пропускания датчиков второго порядка зависит от С,. При ζ = 0,6...0,7 полоса пропускания В =ƒг.
Датчик называется линейным в некотором диапазоне измеряемой величины, если его чувствительность не зависит от значения этой величины. В линейном диапазоне выходной сигнал пропорционален измеряемому параметру, причем в статическом режиме

в динамическом для датчиков первого и второго порядка соответственно имеем

Итак, в динамическом режиме линейность датчика зависит от чувствительности в статическом режиме S(0) и от параметров частотной характеристики (ƒг, ƒ0, ζ). В частном случае, когда датчик работает только в динамическом режиме (это характерно, например, для акустического дальномера), S(0) = 0.
На практике линейность датчика определяют по его градуировочной характеристике. Эту характеристику снимают экспериментальным путем, причем распределение экспериментальных данных аппроксимируют уравнением некоторой прямой, используя метод наименьших квадратов. Напомним, что в этом случае средняя сумма квадратов отклонений экспериментальных точек от полученной прямой минимальна.
Установлено, что приближение экспериментальной зависимости к прямой вида у = ах + b достигается при

|
где N — число точек аппроксимации.
Поведение датчика в установившемся режиме описывает его АЧХ, тогда как на переходных режимах оно определяется инерционными свойствами датчика. Характер переходного режима не зависит от закона изменения измеряемой величины, а определяется только свойствами элементов собственно датчика. Быстродействие — это параметр датчика, позволяющий оценить как выходной сигнал следует во времени за изменением измеряемой величины. Таким образом, быстродействие характеризует время, необходимое для того, чтобы влияние переходных процессов на выходную величину стало пренебрежимо малым для заданной точности. Параметр, используемый для количественного описания быстродействия, называется временем установления tуст. Следовательно, (tуст — это интервал времени, который должен пройти после приложения ступенчатого сигнала, для того чтобы сигнал на выходе датчика достиг уровня, отличающегося от входного не более чем на заданную величину ε. Различают четыре составляющие времени установления tуст (рис. 1.3):
· время задержки нарастания tзн — время, соответствующее увеличению выходного сигнала на 10 % от установившегося значения;
· время нарастания ƒн — время, необходимое для увеличения выходного сигнала от 10 до 90 % от установившегося значения;
· время задержки спада ƒзс — время, соответствующее уменьшению выходного сигнала на 10 % от установившегося значения;
· время спада tс — время, требуемое для уменьшения выходного сигнала от 90 до 10 % от установившегося значения.

Поскольку уравнение динамики датчиков
первого порядка в переходном режиме имеет вид

 то при начальных условиях(y=0,t=0)
то при начальных условиях(y=0,t=0)
где y0=x0/B, τ=A/B=1/(2π𝑓г) –установившееся значение выходного сигнала и постоянная времени датчика соответственно.
время установления tуст можно определить по графику переходного
процесса (рис. 1.4, а). При этом необходимо указывать ошибку г между текущим значением у и его установившимся значением у0: ε = (у0 - у)/у0. Так,
для ε = 1 % tуст = 4,6τ = 0,73/ƒг, для ε = 10 % tуст ≈tH = tc = 2,3τ. Следовательно, чем выше граничная частота, тем выше быстродействие датчика.
 Уравнение динамики датчика второго порядка в переходном режиме имеет вид
Уравнение динамики датчика второго порядка в переходном режиме имеет вид



Часто при оценке переходных процессов наряду с коэффициентом затухания ζ используют понятие «декремент затухания». Декремент затухания δ — это величина, обратная числу колебаний, по окончании которых максимальное значение амплитуды убывает в е раз (где е — основание натуральных логарифмов, е ≈ 2,718):

|
От быстродействия следует отличать производительность устройства (обычно характерна для цифровых систем), определяемую числом операций в секунду. На быстродействие датчика влияют факторы, не связанные с ним непосредственно, например окружающая среда. Так, для резистивного термометрического зонда при ε=10%t уст составляет 2,6 с в воде, текущей со скоростью 0,2 м/с, и 40 с в воздухе, движущемся со скоростью 1 м/с. Требования к чувствительности и быстродействию датчика противоречивы, поэтому при расчетах это необходимо учитывать.
Дата добавления: 2015-08-26; просмотров: 247 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| В4. Понятие об информационном подходе | | | Процесс измерений. Информационная модель |