Читайте также:
|
Предположим, что система может менять случайным образом свое состояние в некоторые моменты времени t 1, t 2, …,
ti, … Последовательность принимаемых системой состояний называется случайным процессом (цепью).
Обозначим En, где n = 1, 2, … – множество возможных состояний системы, Pn (i) – вероятность нахождения системы в конкретном состоянии En в момент времени ti.
Марковский процесс – это такой процесс, будущее состояние которого определяется только его состоянием в настоящий момент времени и не зависит от предыдущих состояний.
Поэтому, каждой паре состояний En, Ek можно поставить в соответствие условную вероятность Pnk того, что система будет находиться в состоянии Ek в момент ti +1 при условии, что в момент ti она находится в состоянии En.
Цепь Маркова с непрерывным временем удобно изображать в виде графа состояний, узлы которого соответствуют возможным состояниям системы, а дуги графа – возможным одношаговым переходам между состояниями. Каждая дуга снабжается числом, равным вероятности соответствующего перехода, что иллюстрирует рис. 2.

Обозначим:
En – состояние системы, когда в ней находится n заявок;
l n – интенсивность входного потока в состоянии En;
m n – параметр закона распределения времени обслуживания в состоянии En.
Рассмотрим процесс функционирования системы на малом интервале времени (t, t + dt). На этом отрезке времени в системе могут произойти следующие переходы с соответствующими вероятностями:
· вероятность перехода E 0 ® E 0 определяется вероятностью отсутствия прихода заявок в течение интервала (t, t + dt) и равна (1 – l0 dt);
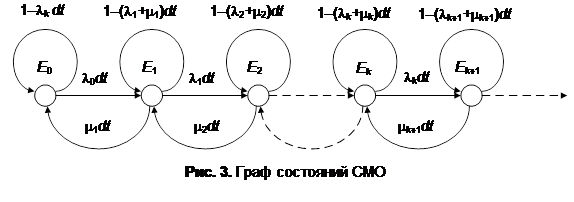
· вероятность перехода En ® En +1 определяется вероятностью прихода заявки и равна l ndt;
· вероятность перехода En ® En –1 определяется вероятностью обслуживания за время  одной заявки. При показательном законе обслуживания на выходе СМО имеем пуассоновский поток плотности m n, в котором вероятность появления события на интервале равна m ndt;
одной заявки. При показательном законе обслуживания на выходе СМО имеем пуассоновский поток плотности m n, в котором вероятность появления события на интервале равна m ndt;
· вероятность остаться в текущем состоянии (переход En ® En) равна 1 – l ndt – m ndt, она определяется вероятностью составного события: за время dt заявка не придет и не будет обслужена.
Учитывая все перечисленные переходы и их вероятности, можно построить граф состояний, показанный на рис. 3.
Графу состояний соответствует матрица переходов

На рис. 4 представлен пример одноканальной СМО.

Для графа состояний этой СМО система уравнений имеет вид:
P (t + dt) = P (t) J, где 
Уравнения вероятностей состояний в развернутом виде

Последние при dt ® 0 преобразуются в дифференциальные уравнения Колмогорова:

Эти уравнения могут быть решены при заданных начальных условиях, например P 0(0) = 1, Pn (0) = 0, n ¹ 0. Из решения системы уравнений при  следуют решения для стационарных (финальных) вероятностей состояний
следуют решения для стационарных (финальных) вероятностей состояний 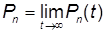 .
.
Решение системы линейных дифференциальных уравнений и построение временных характеристик в среде MathCAD выполняется с помощью тех же методов и средств, которые использовались для этих целей в лабораторной работе №1. Применительно к системе дифференциальных уравнений вероятностей состояний MathCAD-программа может выглядеть как на рис. 5.

|
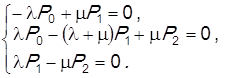
Прямой путь получения уравнения стационарного режима состоит в приравнивании нулю производных вероятностей состояний в системе дифференциальных уравнений Колмогорова и замене переменных Pn (t)на Pn. Для описываемой системы получим
Кроме того, одно из линейно зависимых уравнений (любое) следует заменить уравнением нормировки. Окончательная система линейных алгебраических уравнений имеет вид:
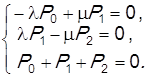
Эту систему необходимо решить средствами MathCAD.
Дата добавления: 2015-08-17; просмотров: 101 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| МОДЕЛИ МАССОВОГО ОБСЛУЖИВАНИЯ | | | Поля геологических признаков |