Читайте также:
|
К основным параметрам грейдер–элеватора относят размеры и углы установки дискового ножа, а также возможный вылет и высоту установки конвейера. Дисковый нож вогнут по сфере, а его режущая кромка образуется конусной заточкой. Обычно применяют ножи диаметром Dн =600…1200 мм. Радиус кривизны ножа rн (рис. 14.34) определяют по формуле:
 ; (14.142)
; (14.142)
Угол заострения принимают в пределах β =15…200. Нож устанавливают на плужной раме с учетом угла установки θ в вертикальной плоскости и угла захвата λ =40…500 в горизонтальной плоскости. Угол θ зависит от угла резания α =40…600. Задний угол γ принимают не менее 6…70.
При работе грейдер–элеватора необходимо с наименьшими потерями вырезать грунт и подавать его на конвейер. Последнее условие можно выполнить в том случае, если вырезанный пласт грунта попадает на середину конвейера. Это достигается выбором расстояния от наиболее приближенной к конвейеру кромки ножа до переднего края конвейера по формуле:
 ; (14.143)
; (14.143)
где В – ширина ленты.
Зазор между ножом и конвейером должен быть минимальным: h1 =3…6 см. При заглублении ножа в грунт на глубину h =(0,4…0,5)· Dн сечение срезанной стружки можно принимать:
 ; (14.144)
; (14.144)
При разработке грунта грейдер–элеватор преодолевает силы сопротивления перемещению машины Рпер и резанию грунта Ррез. Сопротивления, возникающие при трении конвейера о грунт и от призмы волочения, не учитывают вследствие их незначительности.
Сопротивление грунта копанию:
 ; (14.145)
; (14.145)
где к – удельное сопротивление грунта резанию.
При определении сопротивления перемещению грейдер-элеватора следует учитывать вертикальную составляющую сопротивления грунта резанию Рн и массу грунта, находящуюся на конвейере:
 ; (14.146)
; (14.146)
где φ 1 – коэффициент, равный 0,4…0,5.
Масса грунта:
 ; (14.147)
; (14.147)
где По – производительность грейдер–элеватора; Lл – длина ленты конвейера; ρг – плотность грунта, Jл – скорость ленты конвейера.
 ; (14.148)
; (14.148)
где К – коэффициент потерь грунта, Кп =0,95…0,96 при системе прямоугольных ножей; Кп =0,90…0,95 при дисковом ноже.

Рис. 14.34 Параметры рабочего органа грейдер – элеватора: а – установка ножа в вертикальной плоскости; б – то же в плане.
Тогда:
 ; (14.149)
; (14.149)
где Gэ – сила тяжести грейдер–элеватора; f – коэффициент сопротивления перемещению.
Эксплуатационную производительность грейдер – элеватора при возведении насыпи из двухсторонних резервов можно определить по формуле:
 ; (14.150)
; (14.150)
где h и b - соответственно глубина и ширина резания; Кп - коэффициент потерь грунта, Кп=0,9¸0,95; Кф – коэффициент отклонения формы ножа от прямоугольной, Кф =0,85 для дисковых ножей, Кф =1,0 для системы прямоугольных ножей; L – длина участка разработки, м; tпов – время, затраченное на повороте, с; Кв – коэффициент использования рабочего времени.
14.5.4. Силы, действующие на грейдер – элеватор.
При работе на грейдер – элеватор действуют силы (рис. 14.35). Активными силами являются силы тяжести тягача Gт и грейдер – элеватора Gэ, конвейера с грунтом Gк+г и окружная сила на колесах Р0; реактивными – составляющие сопротивления грунта копанию Рк, Рн, Рб, вертикальные реакции на колеса R1 и R2, боковые реакции на колеса Рб1 и Рб2 и сопротивления перекатыванию колес R1пер и R2пер.
Определить неизвестные силы можно по методикам, изложенным в подразделах 14.2.6; 14.3.6; 14.4.6. Значение составляющей сопротивления грунта копанию:
для полуприцепного грейдер – элеватора:
 ; (14.151)
; (14.151)
для прицепного:
 ; (14.152)
; (14.152)
где Рт – тяговое усилие на крюке тягача; Rпер – сопротивление перемещению машины; Кд – коэффициент динамичности, Кд =1,2…1,5.
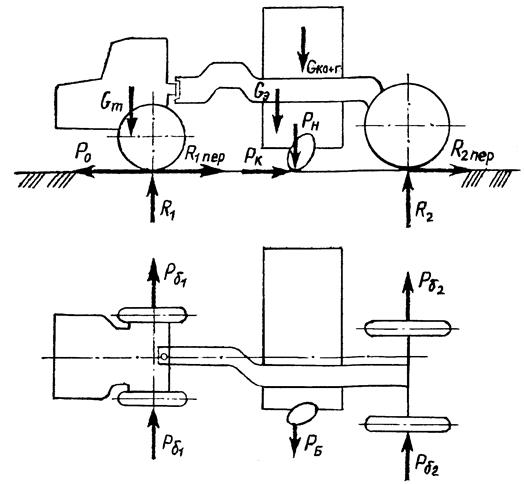
Рис.14.35 Схема для определения сил, действующих на грейдер – элеватор.
Вертикальную Рн и боковую Рб составляющие сопротивления копанию можно определить в зависимости от значения Рк.
 ;
;  ; (14.153)
; (14.153)
где φ 1 и φ2 –коэффициенты, зависящие от положения дискового ножа, φ1 =0,1…0,4; φ2= 0,5…0,7.
Под найденным значениям сил производят расчет машины на прочность, исходя из условия внезапной встречи ножа с непреодолимым препятствием. При этом рассматривают два случая: первый, когда нож опущен на полную глубину; второй – нож находится на уровне поверхности грунта.
Литература
1. Антипенко Г.Л., Кашевская Е.В., Костенко К.К. и др. Новые технологии и машины при строительстве и ремонте автомобильных дорог.-Мн.: Дизайн ПРО, 2002.-224 с.
2. Аринченков В.Н., Болотный А.В. и др. Ремонтно-строительные машины и механизмы.-Мн.: Высш. Школа, 1988.-280 с.
3. Баловнев В.И. и др. Дорожно-строительные машины и комплексы. М. – Омск, 2001. – 528 с.
4. Баловнев В.И., Хмара Л.И. Интенсификация земляных работ в дорожном строительстве. – М.: Транспорт, 1983. – 183 с.
5. Баловнев В.И., Хмара Л.И. Повышение производительности машин для земляных работ. – К.: Будивэльник, 1988. – 152 с.
6. Белецкий Б.Ф. Строительные машины и оборудование. Справочное пособие. – Ростов Н/Д.: Феникс, 2002. – 592 с.
7. Васильев А.А. Дорожные машины. – М.: Машиностроение, 1987. – 416 с.
8. Волков Д.П., Крикун В.Я., Тотолин П.Е. и др. Машины для земляных работ. – М.: Машиностроение, 1992. – 448 с.
9. Ветров Ю.А., Кархов А.А., Кондра А.С., Станевский В.П. Машины для земляных работ. – Киев.: Вища школа, 1981. – 384 с.
10. Гаркави Н.Г., Ариченков В.И., Карпов В.В. и др. Машины для земляных работ. – М.: Высш. Школа, 1982. – 335 с.
11. Добронравов С.С., Дронов В.Г. Строительные машины и основы автоматизации. – М.: Высш. Школа, 2001. – 575 с.
12. Домбровский Н.Г., Гальперин М.И. Строительные машины. – М.: Высш. Школа, 1985. – 224 с.
13. Захарчук В.З., Телушкин В.Д. и др. Бульдозеры и рыхлители. – М.: Машиностроение, 1987. – 240 с.
14. Зеленин А.Я. Основы разрушения грунтов механическими способами. – М.: Машиностроение, 1968. – 376 с.
15. Кузнецов Е.В. Двигатели самоходных машин. – Могилев.: МГТУ, 2003. – 320 с.
16. Растегаев И.Н. Разработка мерзлых грунтов в северном строительстве. – Новосибирск.: ВО «Наука» Сибирская издательская фирма, 1992. – 351 с.
17. Ульянов Н.А. Теория самоходных колесных землеройно-транспортных машин. – М.: Машиностроение, 1969. – 520 с.
18. Федоров Д.И. Рабочие органы землеройных машин. – М.: Машиностроение, 1977. – 288 с.
19. Шостак Я.Е., Горнак А.М. Экскаваторы. – Мн.: Вышэйшая школа, 1989. – 398 с.
20. Фрейкман И.Е., Ильчисонис В.К. Землеройные машины. – Л.: Машиностроение, 1972. – 320 с.
21. Щемелев А.М. Расчет бульдозера. – Могилев.: МГТУ, 2001. – 137 с.
Дата добавления: 2015-07-20; просмотров: 149 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Конструктивные схемы и рабочий процесс. | | | Для начала никак не могу не вспомнить о передачах с участием «Самоцветов» которые оставили очень большой и светлый след в моей жизни. |