Читайте также:
|
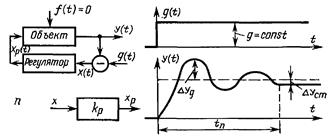
Устройство, с помощью которого в системах регулирования обеспечивается автоматическое поддержание технологической величины около заданного значения, называют автоматическим регулятором. Регулятор является одним из элементов замкнутей системы.
На вход автоматического регулятора подаются текущее уТ и заданное uз значения регулируемой величины. Рассогласование между ними уТ – uз приводит к изменению выходной величины регулятора x p

Эту зависимость в относительных величинах (при u = 0)

называют законом регулирования. Каждый конкретный регулятор имеет свой закон регулирования.
П-регуляторы используют для объектов с самовыравниванием и без него. Но иногда устойчивое регулирование с их помощью оказывается возможным только за счет значительного уменьшения точности – величина остаточного отклонения может оказаться недопустимо большой.
Пропорциональные (статические) регуляторы или П-регуляторы. Это наиболее простые регулирующие устройства, у которых регулирующее воздействие хр пропорционально отклонению регулируемого параметра

где  –коэффициент усиления регулятора. Передаточная функция регулятора
–коэффициент усиления регулятора. Передаточная функция регулятора  . В П-регуляторах имеется механизм настройки зоны регулирования
. В П-регуляторах имеется механизм настройки зоны регулирования  (предела пропорциональности),
(предела пропорциональности),  . Чем больше зона регулирования, тем меньше
. Чем больше зона регулирования, тем меньше  , меньше хр и тем больше статическая (установившаяся) ошибка регулирования
, меньше хр и тем больше статическая (установившаяся) ошибка регулирования  при одном и том же отклонении регулируемого параметра к. Знак минус в законе регулирования (.
при одном и том же отклонении регулируемого параметра к. Знак минус в законе регулирования (.  ) указывает на то, что регулятор с объектом соединяется отрицательной обратной связью. П-регуляторы применяются обычно в простых АСР параметров объектов с самовыравниванием.
) указывает на то, что регулятор с объектом соединяется отрицательной обратной связью. П-регуляторы применяются обычно в простых АСР параметров объектов с самовыравниванием.
 Пропорционально-интегральные, или изодромные, регуляторы характеризуются тем, что при отклонении регулируемой величины от заданного значения они вначале перемещают регулирующий орган пропорционально отклонению (как П-регулятор), а затем при подходе регулируемой величины к заданному значению медленно доводят ее до этого значения (как И-регулятор). Такое регулирование достаточно точно и быстродействующее.
Пропорционально-интегральные, или изодромные, регуляторы характеризуются тем, что при отклонении регулируемой величины от заданного значения они вначале перемещают регулирующий орган пропорционально отклонению (как П-регулятор), а затем при подходе регулируемой величины к заданному значению медленно доводят ее до этого значения (как И-регулятор). Такое регулирование достаточно точно и быстродействующее.

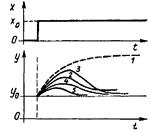
Рис. 1. Структурная схема регулятора
Рис. 2. Характеристики переходного процесса для различного типа регуляторов:
1 – отсутствие регулятора; 2 – П-регулятор: 3 – И-регулятор, 4 – ПИ регулятор; 5 – ПИД-регулятор
Регулятор, действующий по такому принципу, называемся ПИ-регулятором. Такие регуляторы действуют по следующему закону регулирования
 »
»
где Кр – коэффициент передачи регулятора; ТИ – время изодрома; Кр и Ти – показатели настройки регулятора. Передаточная функция ПИ-регулятора имеет вид

ПИ-регуляторы применяют в случаях, когда необходима большая точность регулирования и быстродействие.
Дата добавления: 2015-07-25; просмотров: 97 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Показатели качества систем управления. | | | Описание технологических процессов как объектов управления (на примере уровня) |