Читайте также:
|
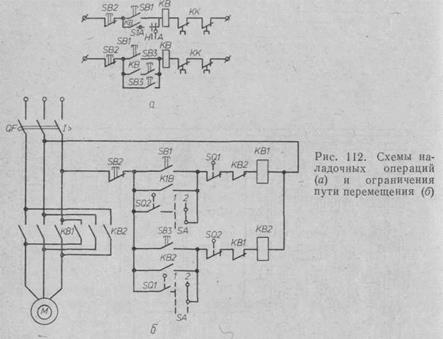
Наладочные операции предназначены для опробования отдельных элементов станка установкой и выверкой обрабатываемых изделий инструмента. Они характеризуются кратковременным включением ненагруженного привода при невысокой скорости в обоих направлениях вращения.
Эти операции самостоятельные, не требуют введения в действие всей системы управления. Выполняется этот вид блокировки нажатием кнопок SB1 или SB3 при отсутствии блокирования их контактами контактора KB (рис. 112, а). В первом случае это pea-
лизуется включением переключателя SA в цепь, блокирующую кнопку SB1, во втором — применением двухцепной кнопки SB3. Возможны и другие аппаратурные решения.
Блокировочные связи, обеспечивающие ограничение пути перемещения. Автоматическое ограничение перемещения и точная остановка привода и механизма станка в заданном положении реализуются при помощи конечных или путевых выключателей.
Ограничение перемещений в зависимости от условий работы может быть вызвано необходимостью остановки в следующих случаях: в крайнем положении узла станка, по окончании рабочего цикла, для исключения столкновения узлов механизма, управления ускоренным и замедленным движением, автоматизации цикла работы в станках, реверсирования и др.
Ограничение пути перемещения должно производиться с большей или меньшей точностью. При малых скоростях перемещения упоров (v  0,4 м/мин) применяют конечные выключатели мгновенного действия, обеспечивающие быстрое срабатывание контактов независимо от скорости движения механизма станка.
0,4 м/мин) применяют конечные выключатели мгновенного действия, обеспечивающие быстрое срабатывание контактов независимо от скорости движения механизма станка.
В станках, где необходима точная остановка, используют конечные микропереключатели с ходом штока 0,5  0,7 или 0,2 0,3 мм.
0,7 или 0,2 0,3 мм.
Примеры схем реализации блокировочных связей, обеспечивающих ограничение пути перемещения, приведены на рис. 112 б.
Схема рис. 112, б обеспечивает при разомкнутом переключателе SA остановку двигателя при движении узла станка вперед конечным выключателем SQ1, назад — SQ2. При включенном переключателе SA обеспечивается остановка и реверс без выдержки времени.
Схема на бесконтактных элементах «Логика-Т», реализующая реверсирование и возвратно-поступательное движение, представ-
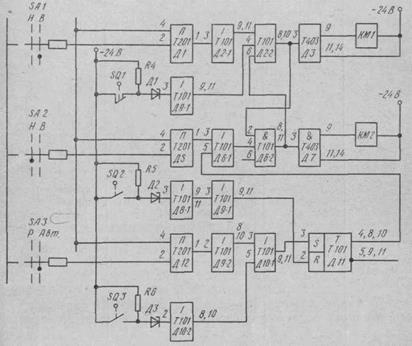
Рис. 113. Бесконтактная схема управления возвратно-поступательным движением
лена на рис. 113. Для получения этого режима командоконтроллер ручного управления SA1 устанавливают в положение В («Вперед»), а переключатель SA3 в положение «Авт.». Через элементы Д1—Д2-1 на вход 2 элемента Д2-2, выполняющего функцию И с входами по нулям, поступает сигнал «0», на двух остальных входах в исходном положении тоже присутствуют сигналы «0», следовательно, на выходе элемента Д2-2 появляется сигнал «1», который через усилитель ДЗ включает контактор КМ1 («Вперед»).
В конце хода «Вперед» при появлении «0» на выходе цепи конечного выключателя SQ1 появляется «1» на входе 4 элемента Д2-2, контактор КМ1 отключается, и механизм останавливается.
Сигнал «1» с переключателя SA3 поступает через элемент Д12 на вход элемента Д9-2. На входе 3 элемента Д10-1, выполняющего функцию И с входами по нулям, появляется «0». При достижении
7. ОСНОВНЫЕ ВИДЫ МЕЖУЗЛОВЫХ СВЯЗЕЙ
| „ Направление Вид привода связи Характер связи Вид привода ■*----------------------------------- Блокировочная связь сог- Насоса смазки ласования. Разрешающая ----------------------------------- *■ Разрешающая Насоса охлаждения 1 лавныи +----------------- Отключающая в аварийной привод ситуации ----------------------------------- >■ Разрешающая Подачи -<---------------------------------- Последовательность от ключения <---------------------------------- Разрешающая Зажима изделия ----------------------------------- >- Запрещающая (при подаче) Установочных пере- ----------------------------------- >• Разрешающая (для быст- мещений рых перемещений) <---------------------------------- Разрешающая (после от- Зажимного устрой- —». жима) ства подвижного ор- Привод Запрещающая (при подаче) гана подачи / -S- Блокировочные связи со- Другие приводы гласования |
механизмом крайнего положения при ходе «Вперед» на выходе цепи конечного выключателя SQ3 появляется «1», а на входе 5 элемента Д10-1 сигнал «0», с выхода этого элемента сигнал «1» включает элемент памяти Д11. Сигнал «1» с выхода Д11 поступает на вход 5 элемента Д6-1, т. е. когда механизм отключен, в крайнем положении («Вперед»), включается контактор КМ2 и механизм реверсируется. Несмотря на наличие сигнала «0» на выходе элемента Д2-1 и появление «0» на входе 4 этого элемента при движении назад контактор КМ1 не включается. Это происходит только после появления «0» на входе элемента Д6-2 при отключении контактора КМ2 и элемента памяти Д11, когда появляется «0» на выходе цепи конечного выключателя SQ2 в исходном положении механизма.
Блокировочные связи, обеспечивающие согласование работы отдельных узлов станка. Деревообрабатывающие станки изготавливают с отдельными органами, не имеющими механической связи. В связи с этим возникает необходимость в определенной последовательности введения их в работу. К таким узлам можно отнести: механизм главного движения, механизм подачи, вспомогательные
механизмы (зажим изделия, механизм уклона пильной рамки и т. д.) насосы смазки и др. Основные виды межузловых связей представлены в табл. 7.
Схемы согласования главного привода и привода подачи (рис. 114, а), главного привода и главного насоса (рис. 114, б), вспомогательных приводов носят типовой характер и могут использоваться в других случаях с аналогичными технологическими требованиями.
Включение главного привода (рис. 114, а) должно предшествовать включению привода подачи во избежание поломки инструмента, при отключении наоборот, привод подачи отключается первым. На схеме предусмотрена остановка главного привода через выдержку времени, обеспечиваемую реле КТ.
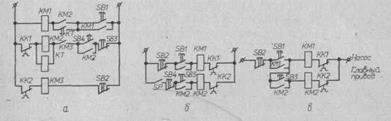
Рис. 114. Схемы согласования работы главного привода:
а — с приводом подачи; б—в — с приводом насоса смазки
Нажатие кнопки SB2 отключает контакторы КМЗ, КМ2, реле времени КТ и реле времени разомкнет свои контакты КТ в цепи контактора КМ. Главный привод отключится.
Включение насоса смазки и главного привода может быть выполнено по схеме рис. 114, в, где представлены два варианта включения. На схеме главный двигатель включается при неизвестном давлении в системе смазки. Применение реле давления SP и отключение контактов SP в цепи контактора КМ2 обеспечивает пуск главного привода при нормальном давлении в системе смазки. Снижение давления вызовет отключение привода.
Согласование работы вспомогательных механизмов аналогично согласованию работы механизмов конвейерных линий или отдельных приводов (см. рис. 111, 112).
Рассмотренные типовые варианты блокировочных связей носят общий характер, а их применение определяется условиями технологического процесса и конкретными особенностями станков.
Дата добавления: 2015-07-25; просмотров: 74 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| СИСТЕМЫ УПРАВЛЕНИЯ СТАНКАМИ, АВТОМАТАМИ И РОБОТАМИ | | | Системы автоматического управления лесопильными рамами. |