Читайте также:
|
Благодаря операционному исчислению стало возможным перейти от классических методов количественного описания динамических свойств линейных систем в виде дифференциальных уравнений к более экономным средствам – передаточным функциям, временным и частотным характеристикам.
Передаточную функцию можно трактовать как комплексный коэффициент преобразования входного воздействия динамической системы в ее реакцию на выходе. Для формирования передаточной функции дифференциальное уравнение системы относительно функций вещественного переменного преобразуют в уравнение для функций комплексного переменного с использованием рассмотренных интегральных преобразований.
Если ввести понятие передаточной функции динамической системы в форме преобразования Лапласа W (p) как отношение изображения выходной функции F (p) к изображению входной (управляющей) U (p) при нулевых начальных условиях W (p) =F (p)/ U (p), то оказывается, что изображение интеграла Дюамеля, являющегося изображением выходной функции, равно произведению передаточной функции на изображение управляющей функции.
Сложные динамические объекты редко идентифицируются сразу как единое целое – обычно получают их описание по частям или звеньям, а затем находят общее описание системы как описание соединения отдельных звеньев.
В этом случае передаточные функции оказываются удобным инструментом определения общего описания линейной системы. Вначале рассмотрим примеры передаточных функций некоторых элементарных звеньев.
Рассмотренные нами ранее уравнения 2-го порядка для механической колебательной системы или электрического колебательного контура, записанные в общем виде как
a 2  + a 1
+ a 1  + a 0 x=ku,
+ a 0 x=ku,
приводят к передаточной функции вида
W (p) =  .
.
Если масса механической системы или индуктивность электрической цепи пренебрежимо малы, то приведенное уравнение вырождается в уравнение первого порядка a 1 + a 0 x=ku и его передаточная функция W (p) =k /(a 1 p + a 0).
Уравнение интегрирующего звена Tdx / dt=u, его решение – x=  , а передаточная функция W (p) = 1/ Tp.
, а передаточная функция W (p) = 1/ Tp.
Звено с постоянным запаздыванием (типа, например, конвейера) описывается уравнением x (t) =u (t – t) и его передаточная функция W (p) =e–pτ.
В управляющих устройствах систем управления используют звенья, имеющие передаточные функции, обратные передаточным функциям колебательного и инерционного звеньев, например, форсирующее звено первого порядка с передаточной функцией W (p) =Tp +1, или форсирующее звено второго порядка с передаточной функцией W (p) =a 2 p 2+ a 1 p +1, или дифференцирующее звено W (p) =ap.
Звенья в системе могут соединяться последовательно, параллельно и встречно-параллельно (обратной связью).
Передаточная функция последовательного соединения звеньев равна произведению входящих в цепочку звеньев:

W (p) =  .
.
При параллельном соединении звеньев результирующая передаточная функция равна сумме передаточных функций входящих в соединение звеньев:

W (p) =  .
.
И, наконец, соединение двух звеньев по принципу обратной связи, когда
x вх1 =x вх± x вых2
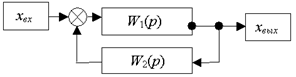
может быть получена так:
x вых =W 1(p) x вх1; x вых2 =W 2(p) x вых
W (p) =  .
.
При этом верхний знак «–» относится к положительной обратной связи, а нижний «+» к отрицательной.
Обратную связь принято называть жесткой, если W 2(p) = const, то есть звено в обратной связи есть простой усилитель. Нежесткие обратные связи имеют ряд разновидностей – гибкие, изодромные, скоростные, запаздывающие и пр.
Дата добавления: 2015-07-25; просмотров: 126 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Примеры интегрирования линейных дифференциальных уравнений с постоянными коэффициентами операторным методом. | | | Частотные характеристики линейных динамических систем |