Читайте также:
|
Робот используется для перемещения заготовок внутри комплекса. Он оснащен пневматическим захватом и имеет 6 осей позиционирования. Схема его сборки представлена на рис. 5.

Рисунок 5. Схема подключения робота
Общий вид робота представлен на рис. 6. Его технические характеристики приведены в табл. 2. Робот может осуществлять позиционирование в нескольких системах координат, представленных на
рис. 7, рис.8 и рис. 9.

Рисунок 6. Общий вид робота RV-1A
Таблица 2. Параметры робота RV-1A
| Параметр | Ед. изм. | Величина | ||
| Число степеней свободы | ||||
| Привода | Асинхронные сервоприводы J1-J3 50 Вт, J4-J6 Вт. | |||
| Оси с наличием тормоза | J1, J2, J3, J5 | |||
| Рабочая область | J1 | Градусы | 300 (от -150 до +150) | |
| J2 | 180 (от -60 до +120) | |||
| J3 | 95 (от +60 до +155) | |||
| J4 | 320 (от -160 до +160) | |||
| J5 | 180 (от -90 до +90) | |||
| J6 | 400 (от -200 до +200) | |||
| Скорость перемещения | J1 | Градусы/сек. | ||
| J2 | ||||
| J3 | ||||
| J4 | ||||
| J5 | ||||
| J6 | ||||
| Максимальная скорость | мм/сек. | |||
| Нагрузка | Максимальная | кг | 1,5 | |
| Номинальная | ||||
| Точность позиционирования | мм | ±0,02 | ||
| Допустимый момент на оси | J4 | Н*м | 1,44 | |
| J5 | 1,44 | |||
| J6 | 0,73 | |||
| Максимальный радиус работы | мм | |||
| Рабочее давление воздуха | МПа | 0,5±10% | ||
| Входы | ||||
| Выходы | ||||
| Масса | кг | |||
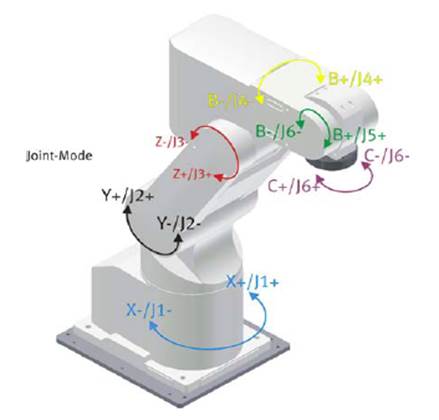
Рисунок 7. Система координат по каждой из осей (JOINT).
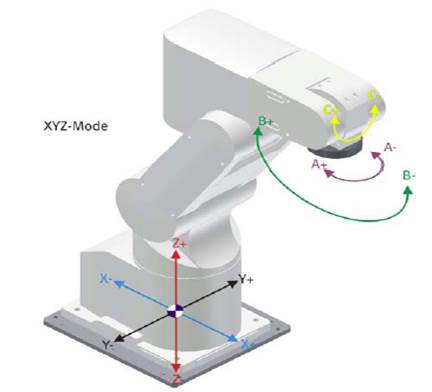
Рисунок 8. Система координат XYZ.
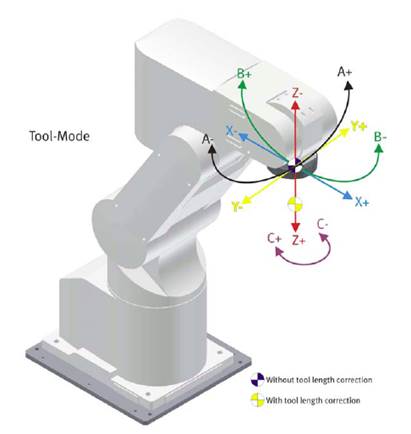
Рисунок 9. Система координат по захвату (TOOL).
Дата добавления: 2015-07-25; просмотров: 68 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Режим автоматической работы | | | Контроллер робота CR-1 |