Читайте также:
|
На третьем этапе выполнения лабораторной работы рассмотрим систему управления электроприводом [1]. Система управления имеет два контура обратной связи. Второй контур управления начинает работать, в случае если контролируемая координата стремится превысить предельно допустимое значение.
Структурная схема модели системы управления приведена на рис.1.3.а., на рис. 1.3.б приведен вил нелинейного элемента. Параметры элементов приведены в табл.1.2.

а
б
Рис. 1.3. Структурная схема и вид нелинейного элемента модели системы управления электроприводом
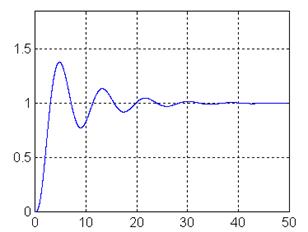
Без регулятора процесс на выходе системы имеет вид представленный на рис. 1.2.а, и не отвечает требованиям по времени регулирования, перерегулированию и виду переходного процесса.
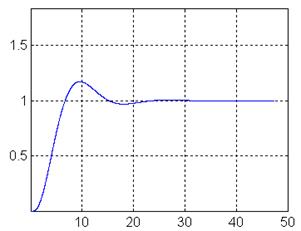
Экспериментально выбирая параметры регулятора, заданного в виде  , формируем значения ячеек табл. 1.1 (время регулирования и величина перерегулирования), сохраняя наиболее интересные графики (рис.1.4.б).
, формируем значения ячеек табл. 1.1 (время регулирования и величина перерегулирования), сохраняя наиболее интересные графики (рис.1.4.б).
а б
Рис. 1.4. Вид переходного процесса на выходе системы регулирования электропривода: а – без регулятора, б – с регулятором
Таблица 1.2. Экспериментальный выбор параметров регулятора
Время регулирования  , c / перерегулирование , c / перерегулирование  , %
вид переходного процесса , %
вид переходного процесса
| |||||

| 
| 
| 
| 
| 
|

|  рис. …
рис. …
|  рис. …
рис. …
|  рис. 1.2.б
рис. 1.2.б
|  рис. …
рис. …
|  рис. …
рис. …
|

|  рис. …
рис. …
|  рис. …
рис. …
|  рис. …
рис. …
|  рис. …
рис. …
|  рис. …
рис. …
|
На основании полученных экспериментальных данных, осуществляем выбор регулятора для системы управления электроприводом методом мозговой атаки.
Дата добавления: 2015-10-21; просмотров: 92 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Порядок выполнения лабораторной работы | | | Порядок выполнения III этапа лабораторной работы |