Читайте также:
|
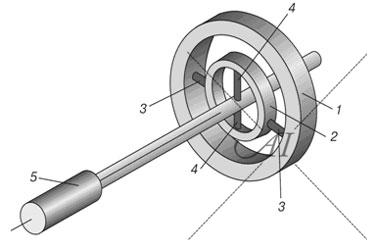 Динамически настраиваемый гироскоп (ДНГ) имеет ротор 1 – носитель кинетического момента, который прикреплен к валу 5 электродвигателя с помощью шарнира Гука показанного на рисунке. Шарнир имеет внутреннее кольцо 2, связанное с ротором и валом торсионами 3, 4. Иногда шарнир имеет два внутренних кольца. Вектор угловой скорости вращения направлен по продольной оси вала. Благодаря торсионной связи под действием момента Lу ось симметрии приходит к оси вращения и ротор занимает перпендикулярное положение к оси вала.
Динамически настраиваемый гироскоп (ДНГ) имеет ротор 1 – носитель кинетического момента, который прикреплен к валу 5 электродвигателя с помощью шарнира Гука показанного на рисунке. Шарнир имеет внутреннее кольцо 2, связанное с ротором и валом торсионами 3, 4. Иногда шарнир имеет два внутренних кольца. Вектор угловой скорости вращения направлен по продольной оси вала. Благодаря торсионной связи под действием момента Lу ось симметрии приходит к оси вращения и ротор занимает перпендикулярное положение к оси вала.
Регулярная прецессия плоского гироскопа всегда направлена навстречу его собственному вращению. Плоским называется гироскоп у которого осевой момент инерции А больше экваториальных В и С. В ДНГ исключена только одна причина возникновения такой прецессии – несовпадение осей вращения и симметрии. Однако это дает возможность настраивать гироскоп изменением угловой скорости вращения.
Известно, что несовпадение оси симметрии и оси вращения не единственная причина регулярной прецессии. Существует еще один момент, приводящий к такой прецессии – это момент Lу 1 от несовпадения центра масс гироскопа с центром подвеса. Изменяя угловую скорость вращения можно добиться, чтобы прецессия от момента Lу 1 равнялась угловой скорости Ω собственного вращения гироскопа. Так как эти угловые скорости направлены встречно, то при их равенстве гироскоп становится неподвижным в инерциальном пространстве. Таким образом, с высокой точностью можно добиться выполнения первого свойства гироскопа. Условие, при котором это явление наступает, является условием динамической настройки: 
Кроме указанного достоинства в таком гироскопе повышение точности обеспечивается еще и тем, сто благодаря торсионному подвесу практически исключены вредные моменты от приводного вала и электродвигателя.



Гироскопический интегратор, гироскопическое устройство, содержащее т. и. интегрирующий гироскоп, который служит для определения интеграла от воздействующей на него величины. Различают Г. и. угловой скорости и Г. и. линейных ускорений.
Г. и. линейных ускорений служит для определения составляющей линейной скорости центра тяжести объекта вдоль заданного направления. Г. и. представляет собой гироскоп с тремя степенями свободы, центр тяжести которого смещен относительно точки подвеса. Вследствие этого Г. и. чувствителен к поступательным ускорениям объекта, т.к. возникающий при этом момент сил инерции вызывает прецессию гироскопа с угловой скоростью, пропорциональной указанному моменту, т. е. величине ускорения объекта. Тогда угол прецессии будет пропорционален линейной скорости объекта, что позволяет, измерив этот угол, найти искомую скорость.
Г. и. реагирует на кажущееся ускорение объекта, т. е. на разность между абсолютным ускорением объекта и гравитационным ускорением (ускорением силы тяготения). Вследствие этого показания прибора пропорциональны интегралу от кажущегося ускорения, т. е. кажущейся скорости. На рис. 2 приведена принципиальная схема Г. и. с трёхстепенным неуравновешенным (тяжёлым) гироскопом гиромаятникового типа. Ротор 1, установленный в гирокамере 2, статически неуравновешен относительно оси качания O'x' в наружном кардановом кольце (рамке) 3; относительно оси Oh (Оу) вращения рамки система полностью уравновешена. Для обеспечения перпендикулярности оси Oz гироскопа к оси Oh (Оу) служит система коррекции, состоящая из контактного приспособления 4 и управляемого им стабилизирующего двигателя 5.
Г. и. реагирует на составляющую w линейного ускорения объекта вдоль оси Oh. Показания Г. и. (величина линейной скорости объекта), пропорциональные углу a поворота рамки 3, снимаются с потенциометра 6. Если ось Oh (Оу), совпадающая с продольной осью объекта, горизонтальна, то из формулы для угловой скорости прецессии наружной рамки после интегрирования получается

где v0— начальная скорость вдоль оси Oh, Н— кинетический момент гироскопа; т — масса ротора и гирокамеры; 1 — смещение вдоль оси Oz центра тяжести ротора и гирокамеры относительно точки подвеса; v — искомая составляющая скорости объекта вдоль оси Oh, которая и определяется по значению угла, снимаемого с потенциометра 6.
Если объект движется под углом к плоскости горизонта (в частности, вертикально), то для определения скорости v объекта из угла a следует вычесть тот угол, на который повернётся рамка под действием силы тяготения.
Г. и. линейных ускорений применяются главным образом в ракетной технике. Возможно применение Г. и. в гироинерциальной вертикали (см. Гировертикаль), где он заменяет акселерометр и интегратор.
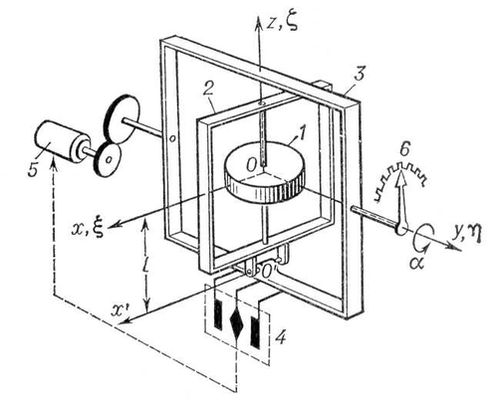
Рис. 2. Принципиальная схема гироскопического интегратора линейных ускорений: 1 — ротор; 2 — гирокамера; 3 — наружное карданово кольцо (рамка); 4 — контактное приспособление; 5 — стабилизирующий двигатель; 6 — потенциометр; Oxhz — оси системы отсчёта; Oxyz — оси, связанные с гирокамерой.
ПИГ


ГИРОСКОП ФУКО


ГИРОКОМПАС


ГИРОШИРОТ










Дата добавления: 2015-10-16; просмотров: 604 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ГЕОГРАФИЧЕСКАЯ СИСТЕМА КООРДИНАТ. | | | Подготовка шоу – рума к презентации коллекций для оптовых покупателей |