Читайте также:
|
В соответствии со СНиП категория автомобильной дороги зависит от интенсивности движения по ней. Поскольку обычно интенсивность движения в период возведения больше, чем: в период их эксплуатации при выполнении задания за расчётный принимается период строительства объекта.
Ожидаемая интенсивность движения в период строительства объекта зависит от количества перевозимых грузов, сроков строительства, марок транспортных средств и определяется по формуле:
N=  , авт/сутки
, авт/сутки
Где q – количество грузов, перевозимых на 1 млн. руб. сметной стоимости строительно-монтажных работ, т;
С – сметная стоимость строительно-монтажных работ по объекту, млн.руб;
Т – срок строительства объекта, годы;
n – число рабочих дней в году;
Кпр – к-т использования пробега автомобиля
Кгр – к-т использования грузоподъёмности автомобиля
Г – грузоподъёмность автомобиля, m
По интенсивности движения N в соответствии с приведённой в табл. 1 СНиП классификацией автомобильных дорог определяется категория дороги.
N=  = 10543 авт/сутки
= 10543 авт/сутки
1.2. Установление параметров дороги по СНиП 2.05.02-85*
В СНиП даны основные параметры автомобильных дорог в зависимости от их категории. Они приведены в пояснительной записке в форме табл. 1 в соответствующем столбце.
1.3. Определение параметров дороги расчётами.
1.3.1.Установление числа полос движения. Число полос движения определяется из сопоставления ожидаемой часовой интенсивности по дороге и пропускной способности одной полосы по формуле:
n =Nч/Nп,
Где Nч – часовая интенсивность движения, авт/час.;
Nп – пропускная способность полосы движения, авт/час.
n =1054,3/590,3=1,8
С учётом неравномерности движения в течение суток
NЧ=N/10, авт/час
NЧ=10543/10=1054,3 авт/час
Пропускной способностью полосы движения называется количество автомобилей, которые могут проехать по ней в течение одного часа при обязательном условии обеспечения безопасности движения.
Пропускная способность полосы движения зависит от скорости движения автомобиля, их марки, типа и состояния покрытия. Теоретически она может быть определена на основании различных моделей транспортного потока, согласно которой автомобили перемещаются по полосе движения друг за другом, без обгона и с постоянной скоростью. В этом случае пропускная способность полосы движения определяется по формуле:
Nп = 1000ʋ/  +
+  +l0+l2, авт/час
+l0+l2, авт/час
Здесь v – расчётная скорость движения, км/час;
 – к-т сцепления, который принимается при проектировании равным 0,5, что соответствует сухому чистому покрытию;
– к-т сцепления, который принимается при проектировании равным 0,5, что соответствует сухому чистому покрытию;
i – продольный уклон дороги (в проекте можно определять пропускную способность полосы на горизонтальном участке);
f – к-т сопротивления качению;
l2 – дина автомобиля, м;
l0 – запас расстояния, равный 5-10 м;
КЭ – к-т эксплуатационного состояния тормозов, равный 1, 4.
Nп = 1000*120/  +
+  +10+7,395=590,3 авт/час
+10+7,395=590,3 авт/час
1.3.2.Определение ширины проезжей части, полосы движения и земляного полотна. Ширина проезжей части b вычисляется по формуле:
b=bnn
где bn – ширина полосы движения, м;
n – количество полос движения.
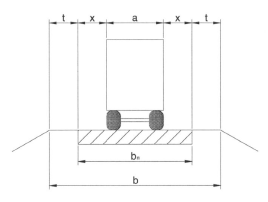
Рис. 1. Определение ширины полосы движения
Ширина полосы движения:
bn =а+2х,
где а – ширина кузова автомобиля, м;
х – расстояние от кузова до обочины или смежной полосы движения, м. Величина х устанавливается по эмпирической зависимости х= 0,004v м,
где v – расчётная скорость движения, км/час.
Ширина земляного полотна В=b + 2t,
Где t – ширина обочины, принимаемая по СНиП.
1.3.3.Определение наименьших радиусов кривых в плане. Проезжая часть автомобильной дороги на кривой в плане может иметь либо двухскатный поперечный профиль, либо односкатный, называемый виражом. Устройство виража диктуется необходимостью повышения устойчивости автомобиля против бокового скольжения при действии центробежной силы.
Наименьший радиус кривой в плане, при котором возможно применение двухскатного профиля при данной расчётной скорости движения, определяется по выражению:
RH = 
RH =  =872
=872
При назначении радиусов поворота, меньших Rн, необходимо предусматривать устройство виража.
При значительном уменьшении радиуса поворота центробежная сила возрастает настолько, что витраж уже не обеспечивает устойчивости автомобиля против бокового скольжения. Это наименьшее значение радиуса поворота автомобильной дороги с виражом вычисляется по формуле:
RHВ = 
RHВ =  =945
=945
φП – к-т сцепления колеса с дорогой в поперечном направлении;0,1-0,15;
iN – поперечный уклон проезжей части$
iв – уклон виража (см. СНиП)
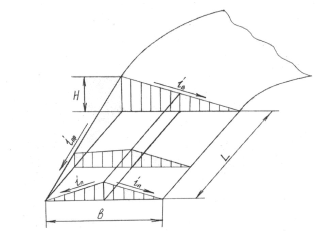
Рис. 2. Схема отгона виража
При устройстве виража длина отгона L определяется по выражению:
L= b  , где
, где
b – ширина проезжей части, м;
iПР – дополнительный продольный уклон отгона виража (см. СНиП)
1.3.4.Видимость пути. Для обеспечения безопасности движения с расчётной скоростью водитель должен видеть дорогу на определённом расстоянии, называемом расстоянием видимости поверхности дороги. Оно равно:
SВД = l1 + ST + l0, где
SВД = 33,3 + ST + 10=
l1 = v/3,6=120/3,6=33,3 м – путь, проходимый автомобилем за время реакции водителя, принимаемое равным 1 сек; ST – длина тормозного пути,
ST =  ;
;
ST =  =153
=153
L0 = 5-10 м – запас расстояния.
На дорогах с одной полосой движения водители автомобилей должны видеть дорогу на ещё большем расстоянии. Оно называется расстоянием видимости встречного автомобиля и вычисляется по формуле:
SВА=  +
+  +lo
+lo
SВА=  +
+  +10= 382
+10= 382
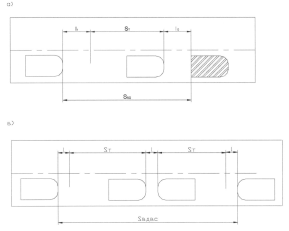
Рис.3. Схемы видимости:
а – поверхности дороги; б – встречного автомобиля
1.3.5.Определение наименьших радиусов вертикальных кривых. Наименьший радиус выпуклой кривой устанавливается из условия видимости дороги:
RВЫП= 
Где d=1,2 м – высота луча зрения водителя над поверхностью дороги.
Наименьший радиус вогнутой кривой определяется из условия ограничения величины центробежной силы:
RВОГ=  м,
м,
v – расчётная скорость движения км/час.
Результаты расчётов сравниваем с данными табл. 10 СНиП.
1.3.6.Определение уширения проезжей части на кривых. Величина уширения устанавливается для принятых в проекте радиусов поворота. При движении по кривой ширина проезжей части, занимаемой автомобилем, увеличивается. Она находится по формуле:
е= 
Где L – расстояние между задней осью и передним буфером автомобиля.
R – радиус кривой.
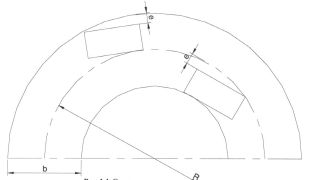
Рис.4 Схема поворота автомобиля
Учёт зависящих от скорости движения отклонений автомобиля от средней траектории производится по эмпирической формуле:
ev= 
Полная величина уширения:
en = e+ev = +
Полная величина умножается на 2, т.к. в нашем проекте установлено двухполосное движение.
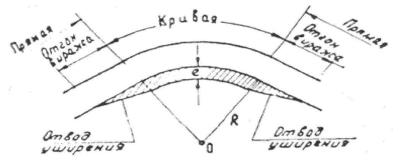
Рис.5. Отвод уширения проезжей части
1.3.7.Определение максимального продольного уклона дороги. Максимальный продольный уклон устанавливается по условиям сцепления ведущих колёс автомобиля с покрытием при трогании с места.
По условиям сцепления при трогании с места:
Imax = Ɣφ - ƒ – j
Ɣ – к-т сцепного веса – отношение веса, приходящегося на ведущие оси ко всему весу автомобиля = 0,76;
j – к-т сопротивления инерции: j = ζ  , где
, где
а = 0,5 – ускорение;
g = 9,8 – ускорение силы тяжести;
ζ – к-т, учитывающий инерцию вращающихся частей автомобиля;
ζ = 1+0,06 х К2
где К = 7,82 – передаточное число в коробке скоростей.
Дата добавления: 2015-08-21; просмотров: 172 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Определение требуемых параметров дороги | | | Требования к проектированию кюветов. |