|
Читайте также: |
Каскад усиления — ступень усилителя, содержащая один или несколько усилительных элементов, цепи нагрузки и связи с предыдущими или последующими ступенями.
В качестве усилительных элементов обычно используются электронные лампы или транзисторы (биполярные, полевые), иногда, в некоторых специальных случаях, могут применяться и двухполюсники, например, туннельные диоды (используется свойство отрицательного сопротивления) и др. Полупроводниковые усилительные элементы (а иногда и вакуумные) могут быть не только дискретными (отдельными) но и интегральными (в составе микросхем), часто в одной микросхеме реализуется полностью законченный усилитель.
В зависимости от способа включения усилительного элемента различаются каскады с общей базой, общим эмиттером, общим коллектором (эмиттерный повторитель) (у биполярного транзистора), с общим затвором, общим истоком, общим стоком (истоковый повторитель) (у полевого транзистора) и с общей сеткой, общим катодом, общим анодом (у ламп)
Каскад с общим эмиттером (истоком, катодом) — наиболее распространённый способ включения, позволяет усиливать сигнал по току и напряжению одновременно, сдвигает фазу на 180°, то есть является инвертирующим.
Каскад с общей базой (затвором, сеткой) — усиливает только по напряжению, применяется редко, является наиболее высокочастотным, фазу не сдвигает.
Каскад с общим коллектором (стоком, анодом) — называется также повторителем (эмиттерным, истоковым, катодным), усиливает ток, оставляя напряжение сигнала равным исходному. Применяется в качестве буферного усилителя. Важными свойствами повторителя являются его высокое входное и низкое выходное сопротивления, фазу не сдвигает.
Каскад с распределенной нагрузкой — каскад, занимающий промежуточное положение между схемой включения с общим эмиттером и общим коллектором. Как вариант каскада с распределенной нагрузкой, выходной каскад усилителя мощности «двухподвес». Важными свойствами являются задаваемый элементами схемы фиксированный коэффициент усиления по напряжению и низкие нелинейные искажения. Выходной сигнал дифференциальный.
Каскодный усилитель — усилитель, содержащий два активных элемента, первый из которых включен по схеме с общим эмиттером (истоком, катодом), а второй — по схеме с общей базой (затвором, сеткой). Каскодный усилитель обладает повышенной стабильностью работы и малой входной ёмкостью. Название усилителя произошло от словосочетания «КАСКад через катОД» (англ. "CASCade to cathODE")[1]
Каскады усиления могут быть однотактными и двухтактными.
Однотактный усилитель — усилитель, в котором входной сигнал поступает во входную цепь одного усилительного элемента или одной группы элементов, соединённых параллельно
Двухтактный усилитель — усилитель, в котором входной сигнал поступает одновременно во входные цепи двух усилительных элементов или двух групп усилительных элементов, соединённых параллельно, со сдвигом по фазе на 180°
14.Магнитные усилители.
Магнитный усилитель — это статический аппарат, предназначенный для управления величиной переменного тока посредством слабого постоянного тока. Применяется в схемах автоматического регулирования электродвигателей переменного тока.
Принцип действия
Работа магнитного усилителя основана на нелинейности характеристики намагничивания магнитопровода. На крайних стержнях магнитного усилителя находится рабочая обмотка, которая состоит из двух катушек, соединённых последовательно. На среднем стержне размещается обмотка управления из большого количества витков W=. Если ток в неё не подаётся, а к рабочей обмотке, соединённой последовательно с нагрузкой, подведено переменное напряжение U~, то из за малого количества витков W~ магнитопровод не насыщается, и почти всё напряжение падает на реактивном сопротивлении рабочих обмоток Z~. На нагрузке в этом случае выделяется малая мощность.
Если теперь пропустить по обмотке управления ток Iу, то даже при небольшом его значении (из-за большого W=), возникает насыщение магнитопровода. В результате реактивное сопротивление рабочей обмотки резко уменьшается, а величина тока в цепи — увеличивается. Таким образом, посредством малых сигналов в обмотке управления можно управлять значительной величиной мощности в рабочей цепи магнитного усилителя.
В простейшем случае магнитный усилитель — это управляемая постоянным током индуктивность, которая включается в цепь переменного тока последовательно с нагрузкой. При большой индуктивности ток в последовательной цепи и в нагрузке маленький, при малой индуктивности ток в последовательной цепи и в нагрузке большой. Существует целый ряд разработок, в которых магнитный усилитель используется для удвоения частоты, бесконтактного переключения токов (бесконтактные реле), для стабилизации напряжения питания, для модуляции сигналов ВЧ сигналами НЧ.
Применение
Основное назначение - управление силовым электроприводом (распространены в строительной технике), также применялись в бытовых стабилизаторах переменного тока, в регуляторах освещения киноконцертных залов, в двоичной ЭВМ ЛЭМ-1 Л. И. Гутенмахера и в троичных ЭВМ «Сетунь» и «Сетунь-70» Н.П.Брусенцов а также в цепях управления тепловоза[1][2][3].
По-прежнему магнитные усилители используются в системах, измеряющих постоянные токи от тензодатчиков. Гибридные схемы, сочетающие в себе миниатюрный магнитный усилитель с полупроводниковым, легко решают проблему дрейфа нуля и обладают высокой точностью.
Магнитный усилитель позволяет бесконтактно измерять постоянные токи в линиях электропередач. В последнее время для этого всё чаще применяют более компактные датчики Холла.
15.Регуляторы. Назначение, законы регулирования.
Закон регулирования-зависимость вых. сигнала регулятора от вх. сигнала рассогласования
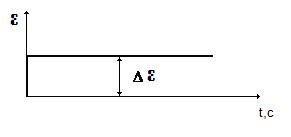
Для сопоставления различных законов рассматривают реакцию регулятора на наиболее сложный скачкообразный сигнал, формируемый на входе регулятора.
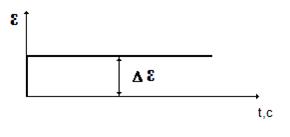
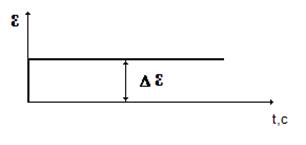
П-закон регулирования (пропорциональный) характеризует прямую зависимость выходного сигнала Y от входного сигнала e, то есть выходной сигнал повторяет с коэффициентом КРП входной сигнал рассогласования. В динамическом отношении П-регулятор – это усилительное звено с коэффициентом КРП.
 Входной сигнал рассогласования Входной сигнал рассогласования
| |
|
|
| Выходной сигнал регулятора | |

|
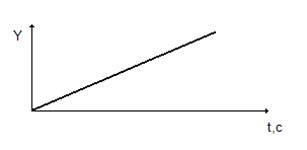
И-закон регулирования (интегральный) характеризуется линейно изменяющимся во времени выходным сигналом регулятора от изменения входного сигнала рассогласования. В динамическом отношении И-регулятор – это интегрирующее звено
 Входной сигнал рассогласования Входной сигнал рассогласования
| ||
|
| ||
| ||
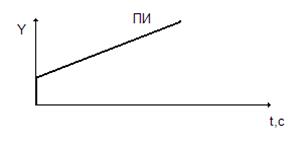
ПИ-закон регулирования (пропорционально-интегральный)
совмещает в себе П- и И-законы регулирования, то есть выходной сигнал регулятора пропорционален величине возмущения на входе и скорости изменения рассогласования. В динамическом отношении ПИ-регулятор - это параллельное включение усилительного и интегрирующего звеньев.
| Входной сигнал рассогласования | |
| |
| Выходной сигнал регулятора | |
| |
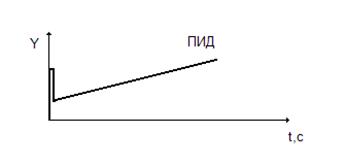
ПИД-закон регулирования (пропорционально-интегрально-дифференциальный). В отличие от ПИ-регулятора имеет дополнительно дифференциальную часть, вносящую эффект предварения в работу регулятора. Отработка регулятором сигнала рассогласования начинается ещё до начала изменения рассогласования, т.е. как только возникают первые признаки появления рассогласования. Действие ПИД-регулятора резко проявляется в первый момент в самом начале появления рассогласования в виде скачкообразного нарастания сигнала Y, затем действие дифференциальной части прекращается, и далее регулятор ведёт себя как пропорционально-интегральный.
 Входной сигнал рассогласования Входной сигнал рассогласования
| |
|
| |
| |
| Выходной сигнал регулятора | |
| Сравнительный анализ показателей качества регулирования | |||
при различных законах (стабилизирующая система регулирования, т.е. ХЗД = const)
|
15.Современные контроллеры. Функциональные возможности.
16.Бесконтактное управление. Логические элементы.
17.Двигатель постоянного тока как объект управления.
18.Асинхронный двигатель как объект управления.
ПИ- статическая ошибка
Выводы:
1. самое минимальное значение Х1 обеспечивает ПИД-регулятор (самое большое Х1 наблюдается в системе с И-регулятором).
2. самый быстродействующий - П-регулятор, самый медленный – И-регулятор (ПИ- и ПИД-регуляторы занимают промежуточное значение).
3. Статическая ошибка регулирования отсутствует во всех регуляторах, кроме П-регулятора.
Качество регулирования в первую очередь зависит от правильности выбора закона регулирования, но даже при этом неправильное определение параметров настройки выбранного регулятора может резко снизить качество регулирования (например: при установке Тд=0 ПИД-регулятор превращается в ПИ-регулятор, при Ти снижается влияние интегральной части и т.п.).
Таким образом, при наладке системы регулирования имеется проблема правильного расчета параметров настройки регулятора, т.е. проблема параметрической оптимизации
Автоматическое управление
1.Основные понятия теории автоматического управления. История и перспективы развития систем автоматического управления.
2.Методы математического описания элементов и систем управления.
Система рассматривается как цель взаимодействующих элементов которые обладают в одном направление. Каждый конструкт элемент рассматривается как приобразователь входных воздействий выходн величину. На основе физических законов записывается математическая модель.
Для системы управления которые описываются деффиринциальным управлением.
Это изменение выходной величины возникающие при действии несколько входных сигналово равна сумме изменения выходных в каждом сигнале отдельно.
Способы:
3.Классификация типовых динамических звеньев систем управления. Характеристики одного из них (на выбор).
· Переходные h(t) процесс изменения выходных величин при единичных
ступенчатых воздействий
· Весовая ω(t) реакция системы на единичном импульсном воздействии
· Амплитуда A(ω)
· Фаза γ(ω)
· Амплитудно-фазные W(jω)
4.Передаточные функции и характеристики точности систем управления.
Передаточная функция - выведенное идеальное (теоретическое) соотношение между входным и выходным сигналом. Устанавливает взаимосвязь между выходным электрическим сигналом датчика S и внешним воздействием: S =f(s). Представляется в виде: таблицы, графика, математического выражения.
Передаточная функцияэто отношение оператора входного воздействия к собственному оператору звена.
Кол-во передаточных ф-ий = кол-ву входных величин при одной выходной.
Различают два основных типа характеристик систем автоматического управления и их звеньев:
1. Временные характеристики;
2. Частотные характеристики.
Временные характеристики систем автоматического управления и их звеньев.
Временными характеристиками систем автоматического управления и их звеньев являются:
1. Переходная функция систем автоматического управления или ее звена.
Обозначение:
2. Весовая функция системы автоматического управления или ее звена.
Обозначение:
Весовую функцию системы (звена) иногда называют импульсной переходной функцией.
Временные характеристики системы управления и ее элементов можно получить:
1. Решая дифференциальное уравнение, являющееся математической моделью системы или ее элемента.
2. Используя аппарат передаточных функций.

- характеристики элементарных звеньев;
- характеристики разомкнутых систем;
- характеристики замкнутых систем.
Временные характеристики систем управления и их звеньев.
Временные характеристики систем автоматического управления и их звеньев являются:
1. Переходная функция системы управления или ее звена:
2. Весовая или переходная импульсная функция системы или ее звена:
Временные характеристики можно получить:
1. Решая дифференциальные уравнение, являющиеся математической моделью системы или ее элемента.
2. Используя аппарат передаточных функций.
5.Анализ устойчивости систем управления.
Под устойчивостью системы понимают ее способность возвращаться в состояние равновесия после снятия возмущающих факторов, действующих на систему. Если система неустойчива, то под воздействием внешних возмущений или после их снятия, она переходит из одного состояния равновесия в другие состояния равновесия (или остается в исходном состоянии). Если система неустойчива, то она не возвращается в состояние равновесия, из которого ее вывели, а либо удаляется от него, либо совершает вокруг него недопустимо большие колебания.
Дата добавления: 2015-10-29; просмотров: 231 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Устройство и основные виды тиристоров | | | Анализ устойчивости с помощью логарифмических амплитудно-частотных характеристик |