Моделі іграшкових підводних човнів виробляються і продаються багатьма компаніями. Їх можливості залежать від ступеня складності моделі, але зазвичай вони управляються по радіо і здатні занурюватися і спливати.

(Рис.5)Іграшковий підводний човен.
Під час переробки іграшкового підводного човна краще відмовитися від радіоуправління і перейти до управління через проводи з використанням відповідного кабелю.
Первісною переробкою може бути установка кольорової відеокамери. Більшість подібних човнів мають порожні відсіки, куди можна встановити електронну схему.
Підводний човен є іграшкою, тому краще не запускати її у відкриті водойми. Крихітні водяні рушії в таких човнах можуть працювати тільки в спокійній воді.
Для зниження загальної маси і ваги пристрою більшість деталей потрібно виконати з алюмінію.
6_)Риба-андроїд:
Робот відрізняється від андроїда своїм зовнішнім виглядом. Якщо робот виглядає як робот, то андроїд копіює зовнішність людини чи іншого живої істоти. З цієї причини риба-андроїд повинна мати вигляд риби.
Створення риби-андроїда не настільки складно, як це може здатися на перший погляд. Причина в тому, що можна придбати досить добре зроблену штучну шкуру риби (подібні предмети продаються в магазинах).
Таку рибу треба розрізати для установлення всередині відповідного механізму.

(Рис.6) Робот (риба), укладений в оболонку гумової риби.
Деякі типи подібних муляжів виглядають більш натурально. Натомість ця модель, зроблена з товстої чи м'якої гуми. Такий робот на вигляд чи дотик дуже реалістична, це вимагає більш потужної оболонки, щоб вона могла рухатися.
Кращим варіантом може бути менш натуральний муляж риби, що має більш тонку шкуру і, отже, вимагає значно менше зусиль для її пересування.
7_)Створення риби – андроїда:
Рух робота-риби забезпечується за допомогою кільцевого соленоїда. При включенні живлення верхня частина соленоїда повертається на кут приблизно 30 °. При відключенні живлення пружина повертає механізм у вихідне положення.

(Рис.7) Кільцевий соленоїд.
У верхній частині соленоїда знаходяться, принаймні, два різьбових отвори близько (1,6 мм), які можуть бути використані для кріплення деталей.
У нижній частині соленоїда є дві стійки з різьбленням (1,6 мм) для кріплення соленоїда. Соленоїд є не дуже потужним, але його достатньо для забезпечення підводного пересування.
8_)Електрична схема риби – андроїда:
Для генерації повільної послідовності імпульсів у схемі використаний одноперехідний транзистор Q_1 (UJT2646).
Частота імпульсів визначається номіналами C_1 і R_1. Імпульси подаються через резистор R_2 на базу Q_2. Q_2 в свою чергу являє собою NPN транзистор типу (2N2222). Транзистор Q_2 використовується для подачі інвертованого імпульсу на вихід_2 (ІС_1). ІС_1 являє собою таймер (555), включений за схемою «одновібратора».
Форма і довжина імпульсу визначаються за допомогою ІС_1. Вихід таймера (555) керує підключенням транзистора Q_3. Транзистор Q_3 управляє струмом, що протікає через кільцевий соленоїд, використаний у роботі.
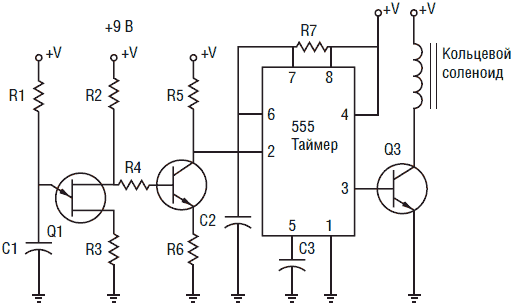
(Рис.8) Схема пристрою.
Живлення такої схеми здійснюється за допомогою батареї напругою (9 В). Схема досить проста і монтується на друкованій платі.
Щоб перевірити роботу схеми, необхідно з'єднати її з соленоїдом перед подальшою збіркою. Постійна часу роботи соленоїда повинна бути в районі 1с.
9_)Механіка риби – андроїда:
Для зниження загальної маси і ваги пристрою більшість деталей потрібно виробити з алюмінію. Перший варіант механізму, що передає рух соленоїда до хвоста «риби - андроїда», зображений на рис.9. 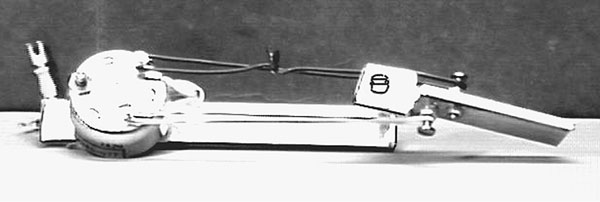
(Рис.9) Початковий привід руху хвоста.
Виявилося, що такий механізм складніший, ніж потрібно. Остаточний варіант приводу хвоста показаний на рис.10.
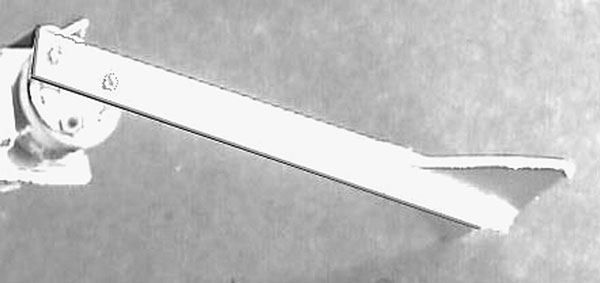
(Рис.10) Остаточний варіант приводу хвоста.
Смуга алюмінію розмірами (3х12х140 мм) прикріплена до верхньої кришки соленоїда за допомогою двох гвинтів діаметром (1,6 мм) і довжиною (6 мм).
Спочатку треба просвердлити два отвори в алюмінієвій смузі, що збігаються з положенням отворів у верхній частині соленоїда. Потім, щоб запобігти надмірно глибокому вкручуванню гвинтів в соленоїд, попередньо накласти на кожен гвинт гайку до упору. Якщо гвинти занадто глибоко вкручені в верхню рухому частину соленоїда, то вони будуть перешкоджати легкому обертанню. Потім необхідно прикріпити алюмінієву смугу до рухомої частини соленоїда.
Плавець хвоста зроблений з квадратного шматочка алюмінію (30 мм), розрізаного по діагоналі. Плавці кріпляться до основи (12 мм) за допомогою клею. Для кращого контакту можна попередньо зачистити поверхні за допомогою наждачного паперу.
Соленоїд кріпиться до задньої частини алюмінієвої пластини розмірами (3x30x50 мм) на двох задніх стійках за допомогою кількох гайок.
До передньої частини кріпиться плата електричної схеми і батарея (див. рис.11).

(Рис.11)Риба - андроїд в зборі.
10_)Гідроізоляція:
Для запобігання попадання води, яка може призвести до псування пристрою, необхідно звернути плату соленоїда в тонку прозору плівку. Чохол із плівки кріпиться до хвоста за допомогою дроту. Кріплення повинно забезпечувати легке поперечне переміщення хвоста.
Перед тим як опускати пристрій у воду, необхідно забезпечити нульову плавучість. Якщо опустити його у воду без цього, то передня «важка» частина робота прямуватиме на дно, а помахи хвоста будуть здійснюватися «в повітрі».
За допомогою гумової стрічки необхідно прикріпити смужки пінопласту до передньої частини моделі (поверх прозорого чохла). Потім покласти модель у воду для перевірки, досягнути горизонтального або майже горизонтального положення рівноваги. Після цього можна включити модель і відпустити її в «плавання».
11_)Ефективність моделі:
Дана модель робота не володіє ККД живої риби, хоча і забезпечує її рух. ККД пристрою можна підвищити, розпилявши алюмінієву хвостову пластину навпіл, і потім з'єднати половини за допомогою пружини довжиною (50 мм). Така пружина дозволить хвосту повертатися і згинатися, що може забезпечити більший ККД пересування.
ВИСНОВКИ
Необхідність світової економіки в енергоресурсах стимулює дослідження все більш глибоководних і важкодоступних районів океану. Підводні апарати будуть використовуватися все активніше, що призведе до збільшення степеню автоматизації.
Роботи на кілометрових глибинах потребують нових підходів до кабельних систем, можливо кабелі-троси замінять потужними бортовими батареями і надтонкими волоконно-оптичними чи навіть зроблять все це безпровідним.
Все це свідчить про великі труднощі автоматизації робіт під водою. Проте перспективи розвитку і використання чутливих роботів вельми великі, без них неможливо уявити прогрес у вирішенні найважливіших науково-технічних проблем освоєння водних просторів.
Дата добавления: 2015-10-29; просмотров: 123 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Класифікація підводних апаратів | | | The Gas Station at Rainbow's End |