Читайте также:
|
Получаемые результаты выявили наличие эффекта влияния многочисленных переотражений в условиях городских каньонов и внутренних помещений зданий на эффективность удержания приёмниками систем NAVSTAR и Galileo захваченного сигнала при различных условиях. Мы оценивали эти параметры путём конфигурирования имитационных параметров таким образом, чтобы номинальная линия обзора сигнала была получена первой, а затем достигалось устойчивое его сопровождение. Затем мы вводили профиль затухания мощности, чтобы посмотреть, может ли приёмник поддерживать стабильное сопровождение сигнала.
В случае, когда имитатор терял захваченный сигнал, то номер профиля вводился возрастающим, для подстраховки того, что потеря захвата была вынужденная, соответствующая профилю, а не являлась результатом больших нарушений непрерывности сигнала.
Если имитатор поддерживал захват, конфигурация сопровождения поддерживалась для большего уровня дискретизации, так что сопровождение пропадало, или появлялась систематическая ошибка, что требовало принятия определённого решения в соответствии с требованиями точности сопровождения и постоянной величины соотношения сигнал – шум CNR. Имитатор выключался, а затем процесс повторялся для других профилей затухания мощности (характеристики определялись для стационарного приёмника и стационарных условий переотражения).
Сопроводительный рисунок показывает один из смоделированных сценариев для городских каньонов, представляющий шаги вдоль улицы с открытым перекрестком на одном конце и городским каньоном на другом. Номер профиля соответствует одиночному номеру профиля затухания мощности для каждого шага. Рис. 9 показывает получающуюся систематическую ошибку определения местоположения для NAVSTAR и Galileo конфигураций, рис.10 – точность приема сигналов и рис. 11 – установившийся уровень соотношения сигнал – шум CNR.

Рис. 9. Систематическая ошибка
определения местоположения (городской каньон).

Рис. 10. Точность приема сигналов.
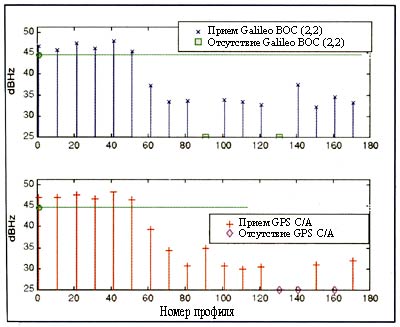
Рис. 11. Установившийся уровень соотношения
сигнал – шум для одинаковых сценариев.
Очевидно, что довольно суровое окружение в условиях пропадания видимости для одиночного приёмника внутри каньона, характерно для профилей с номерами после 51. Не во всех случаях приёмники могут поддерживать сопровождение сигнала, если уровень сигнала падает ниже допустимого порога, равного приблизительно 30 dBHz.. Систематическая ошибка определения местоположения относительно большая в условиях городских каньонов и для NAVSTAR и для Galileo, однако точность приема сигналов лучше у Galileo, чем у NAVSTAR.
На основе общих результатов, полученных при большем числе имитаций, мы покажем, что реализация Galileo BOC имеет лучшую точность сопровождения, чем NAVSTAR C/A BPSK. Систематическая ошибка сопровождения (из–за влияния переотражений) так же ниже, но сильно зависит от доли компонентов малозамедленных переотражений – большой совокупности близлежащих отражений, или единственного отражения в замкнутом объёме, в одинаковой мере воздействующих на устройства обеих систем – NAVSTAR и Galileo. Имеется тем не менее еще возможность точной регулировки параметров сигнала и определения оптимальной архитектуры обработки сигнала BOC.
Дата добавления: 2015-10-24; просмотров: 123 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Моделирование источников переотражения в городе | | | МЕТАФОРЫ БРЭНДОВ |