|
Читайте также: |
В системах автоматики и телемеханики датчики выполняют функции начальных или измерительных элементов. С их помощью автоматические системы получают внешнюю информацию. Точность и надежность работы датчиков во многом определяют соответствующие характеристики работы системы в целом. Датчики должны иметь высокую чувствительность и точность, длительный срок службы и безотказность в работе, малые размеры и массу, низкую стоимость.
Датчик состоит из воспринимающей, промежуточной и исполнительной частей. Воспринимающая часть реагирует на изменение входной величины х и преобразовывает ее в некоторую промежуточную величину, которая сравнивается с эталонным значением аналогичной физической величины, а затем воздействует на исполнительную часть датчика, которая формирует выходной сигнал у.
В зависимости от физической природы входной величины х различают электрические, тепловые, механические, оптические, акустические, жидкостные и газовые датчики. Электрические датчики измеряют ток, напряжение, мощность, частоту, магнитный поток; тепловые - температуру и количество теплоты; механические - силу, давление, перемещение, скорость, ускорение; оптические - силу света; акустические - силу звука, его частоту и мощность; жидкостные и газовые - давление и скорость.
В свою очередь датчики каждого вида классифицируют по принципу действия воспринимающей части. Например, оптические датчики бывают фотоэлектрические, фотохимические, фототермические и фотомеханические.
Другой вид датчиков определяется физической природой выходной величины у. Наиболее широко распространены датчики с электрической выходной величиной - это датчики сопротивления, индуктивности, емкости, тока, напряжения, фазы, частоты.
В зависимости от числа преобразований входной величины х, которые происходят в датчике, различают датчики с непосредственным и промежуточным преобразованиями. В датчиках с непосредственным преобразованием входная величина х непосредственно преобразуется в выходную величину у. Эти датчики наиболее просты по конструкции, так как у них отсутствует промежуточная часть. В датчиках с промежуточным преобразованием может происходить несколько преобразований входной величины.
По виду преобразования х→у датчики делятся на два класса: с непрерывным и дискретным преобразованиями. Датчики с непрерывным преобразованием являются измерительными. В них непрерывному изменению величины х соответствует непрерывное изменение величины у. Датчики с дискретным преобразованием контролируют состояние дискретных объектов, т. е. объектов, имеющих конечное число состояний. Большинство контролируемых объектов являются двухпозиционными и имеют два состояния - "включен" и "выключен". Поэтому дискретные датчики обычно являются датчиками двоичной информации, у которых выходная величина у = 0 или у = 1.
В связи с развитием полупроводниковой техники и широким применением в современных системах автоматики микропроцессоров и микроЭВМ появились и новые тенденции в развитии датчиков. Эти тенденции определяются тем, что датчики должны работать совместно с микропроцессорами и микроЭВМ. Поэтому ценными качествами современных датчиков являются их интегральное исполнение и малые размеры. Последнее позволяет изготовлять в одном корпусе несколько датчиков и получать таким образом комбинированный датчик для измерения нескольких физических параметров одновременно. Интегральное исполнение позволяет также встраивать датчики в другие схемы интерфейса микроЭВМ. Перспективным направлением развития является изготовление "интеллектуальных" датчиков. В этом случае датчики и микропроцессор размещают в одном корпусе, что позволяет сразу же обрабатывать сигналы, поступающие от датчиков.
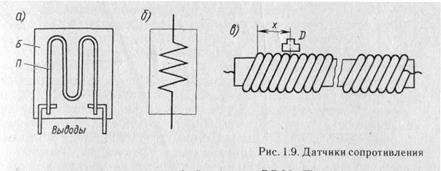
Рис. 1.9. Датчики сопротивления
Датчики с непосредственным преобразованием. Простейшим датчиком с непосредственным преобразованием является тензодатчик (рис. 1.9, а), который применяют для измерения деформаций и механических напряжений на поверхности деталей. Тензодатчик изготовляют из проволоки П с высоким удельным сопротивлением (константан) и малым диаметром (0,006 — 0,020 мм), которую в виде равных и частых петель располагают между двумя листами тонкой бумаги Б и приклеивают к ним. К концам проволоки припаивают медные проводники (выводы), с помощью которых тензодатчик включают в измерительную схему. Тензодатчик плотно приклеивают на поверхность детали и он деформируется вместе с ней. Относительное изменение сопротивления R пропорционально деформации l и напряжению на поверхности детали:

где k — постоянная величина.
В тензодатчике механическая величина (деформация) непосредственно преобразуется в электрическую (сопротивление).
Просты по конструкции и термодатчики, в которых температура преобразуется в напряжение (термопары) или сопротивление (термосопротивления). Последние (рис. 1.9, б) изготовляют из стальной, никелевой или платиновой проволоки, сопротивление которой зависит от температуры. Для измерения температуры применяют термочувствительные ферриты и конденсаторы, у которых изменяется магнитная и диэлектрическая проницаемость. В термочувствительных диодах и тиристорах используется температурная зависимость проводимости р – n -перехода на кристалле кремния.
К датчикам сопротивления относится широко распространенный реостатный датчик (рис. 1.9, в), который преобразовывает ли-
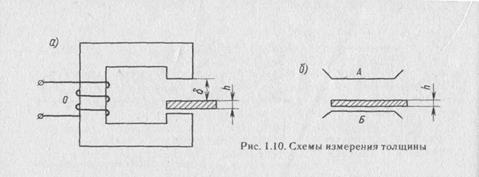
Рис. 1.10. Схемы измерения толщины
нейные перемещения механизмов в соответствующие сопротивления R. При перемещении движка D на расстояние х пропорционально изменяется сопротивление R реостата.
В индуктивных датчиках измеряемая величина преобразуется в индуктивность. Датчик (рис. 1.10, а) измеряет толщину h листа из ферромагнитного материала. Если значение h увеличивается, то уменьшается воздушный зазор δ, индуктивность обмотки О увеличивается, что фиксирует измерительная схема.
В емкостных датчиках используется зависимость емкости конденсатора от площади пластин, расстояния между ними и диэлектрической постоянной. Емкостными датчиками можно измерять линейные и угловые перемещения, размеры, температуру, относительную влажность воздуха и другие параметры. Емкостный датчик (рис. 1.10, б) измеряет толщину листа h из диэлектрика, который располагается между пластинами А и Б конденсатора.
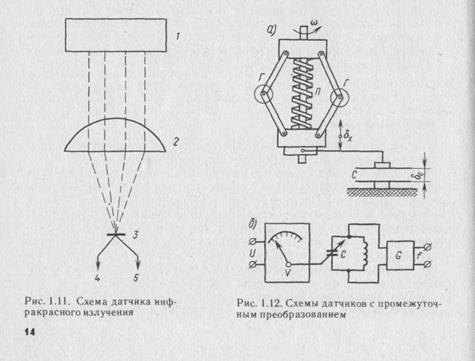
Оптический датчик инфракрасного излучения (рис. 1.11) измеряет температуру нагретого тела. Он состоит из линзы 2, которая фиксирует инфракрасные лучи, испускаемые нагретым телом 1, на поверхности чувствительного элемента 3. В результате этого изменяется сопротивление элемента или на выводах 4 и 5 появляется напряжение. Подобный датчик (болометр) используют в аппаратуре автоматического обнаружения перегретых букс в поездах.
Датчики с промежуточным преобразованием. Эти датчики состоят из нескольких датчиков с непосредственным преобразованием, которые работают последовательно. При этом выходная величина одного датчика является входной величиной следующего.
Датчик (рис. 1.L2, а) преобразует угловую скорость ω в емкость конденсатора С. Воспринимающей частью датчика является цетробежный регулятор, который преобразует угловую скорость в центробежную силу, сравниваемую с силой сжатия пружины П (промежуточная часть). В промежуточной части сила вызывает перемещение δ х нижней муфты регулятора, которая связана с верхней обкладкой конденсатора С. Конденсатор является исполнительной частью датчика, его емкость изменяется с изменением расстояния δ С между пластинами.
Датчик (рис. 1.12, б) преобразует напряжение U в частоту I переменного тока. Напряжение U измеряется вольтметром V, стрелка которого связана с конденсатором С переменной емкости. Конденсатор С включен в задающий контур генератора G, частота f на выходе которого зависит от емкости С. Таким образом, в датчике осуществляются следующие преобразования: U→ угловое перемещение стрелки вольтметра V→C→f.
Датчики с дискретным преобразованием. Эти датчики контролируют состояние объектов и являются источниками входной информации в системах железнодорожной автоматики и телемеханики.
Для контроля свободности участка пути от подвижного состава используют рельсовую цепь (рис. 1.13). Рельсовой цепью является часть участка, ограниченная изолирующими стыками ИС. На одном конце рельсовой цепи к рельсам подключают питание, а на другом — контрольный прибор КП, реагирующий на ток в рельсах, которые используют как проводники. В качестве КП обычно применяют электромагнитное или индукционное реле. Если участок свободен, то через КП протекает большой ток (якорь реле притянут). При занятии участка хотя бы одной колесной парой, сопротивление которой 0,06 Ом во много раз меньше сопротивления КП, ток в последнем резко уменьшается (реле отпускает якорь). Таким образом, по состоянию КП можно судить о свободности или занятости участка пути.
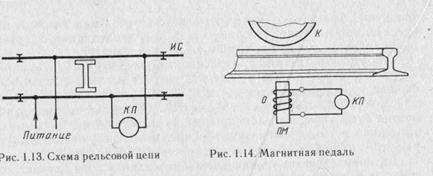
Магнитный датчик (рис. 1.14) фиксирует прохождение скатов вагонов через определенную точку пути. Такой датчик называется бесконтактной магнитной педалью и состоит из постоянного магнита ПМ, обмотки О и контрольного прибора КП. Педаль располагают около рельса. При приближении колеса К к педали параметры магнитного поля вокруг магнита ПМ изменяются, в результате чего в обмотке О возникает электродвижущая сила, по ней начинает протекать ток, что фиксирует контрольный прибор КП.
Дата добавления: 2015-09-02; просмотров: 209 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Характеристики элементов | | | Исполнительные элементы |