Читайте также:
|
В отличие от способа Эри в рассматриваемом случае уничтожение полукруговой девиации осуществляется на четырех главных компасных курсах При этом принимается, как правило, имеющее место на практике допущение об относительной малости СМС АlH и ЕlH
При выполнении работ устраняется или уменьшается не наблюдаемая девиация, а непосредственно CMC ее вызывающие. С этой целью на указанные выше компасных курсах судна производится измерение горизонтальной составляющей Н судового магнитного поля. При принятых допущениях эта составляющая на курсах 0° и 180° будет определяться судовыми магнитными силами lH, ВlH и DlH.
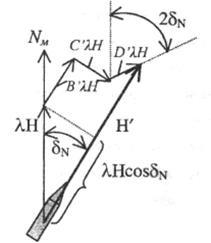 Как следует из рисунка:
Как следует из рисунка:
HN = lH cosdN + DlHcosdN + BlH
HS = lH cosdS + DlHcosdS - BlH
Совместное использование указанных равенств позволяет отделить силы порождающие интересующую нас полукруговую девиацию, от сил ее не порождающих. Действительно, если вычислить среднее значение 0,5(HN + HS) напряженностей магнитного поля, измеренных на противоположных курсах судна, то это значение не будет зависеть от CMC BlH:
Нср = 0,5(HN + HS) = (lH + DlH)cosd
Следовательно, значение силы BlH будет определяться разностью между HN или HS и Нср.
Напряженность судового магнитного поля измеряется с помощью дефлектора, путем компенсации измеряемого поля полем его магнитов. Принимая во внимание сказанное, становится очевидной методика устранения полукруговой девиации. Действительно, зная величину Нср и выставив ее значение на дефлекторе, установленном на пеленгаторе компаса, мы с его помощью компенсируем указанную составляющую судового магнитного поля на одном из рассматриваемых курсов (N или S). В этих условиях на картушку будет действовать только сила BlH, которая осталась не скомпенсированной Названная сила устраняется с помощью продольных постоянных магнитов, расположенных в нактоузе МК.
Уничтожение CMC СlH производится аналогично рассмотренному на курсах 90° и 270°.
2.3. Анализ работы следящей системы.
| МК | 0,0° | 30,0° | 60,0° | 90,0° | 120,0° | 150,0° | 180,0° | 210,0° | 240,0° | 270,0° | 300,0° | 330,0° | 360,0° |
| КК | 0,0° | 30,1° | 60,0° | 89,6° | 119,7° | 150,1° | 179,6° | 209,8° | 240,3° | 269,1° | 299,8° | 330,1° | 360,0° |
| К | 0,3° | 30,2° | 60,3° | 90,4° | 120,4° | 149,8° | 179,6° | 209,7° | 240,3° | 270,6° | 299,8° | 330,2° | 360,0° |
Девиация находится по следующей формуле. d = МК – КК, погрешность работы дистанционной следящей системы находится как разница между КК и К Вычисления приведем в таблице:
| d | 0,0° | -0,1° | 0,0° | 0,4° | 0,3° | -0,1° | 0,4° | 0,2° | -0,3° | 0,9° | 0,2° | -0,1° | 0,0° |
| Dd | -0,3° | -0,2° | -0,3° | -0,4° | -0,4° | 0,2° | 0,4° | 0,3° | -0,3° | -0,6° | 0,2° | -0,2° | 0,0° |
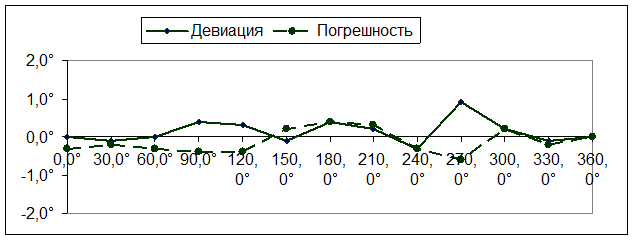
На основе данных таблиц, построим график зависимости Девиации и Погрешности работы дистанционной следящей системы от МК
Из графика видно, что компас имеет неравномерное распределение погрешностей по всему диапазону картушки.
3.  РАБОТЫ, ВЫПОЛНЯЕМЫЕ В РЕЙСЕ В СЛУЧАЕ ОТКАЗА ГИРОКОМПАСА
РАБОТЫ, ВЫПОЛНЯЕМЫЕ В РЕЙСЕ В СЛУЧАЕ ОТКАЗА ГИРОКОМПАСА
Дата добавления: 2015-09-05; просмотров: 441 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Уничтожение полукруговой девиации способом Эри | | | Оценка необходимой точности положения судна при пеленговании. |