Читайте также:
|
Обычная частотная характеристика отражает свойства исследуемого звена при подаче на вход синусоидальных возмущений с постоянной амплитудой.

или показательной форме:

где, BВХ – амплитуда синусоидальных колебаний;
 - частота колебаний, рад/с.
- частота колебаний, рад/с.
Расширенная частотная характеристика отражает свойства объекта (или регулятора) при подаче на вход синусоидальных возмущений с затухающей амплитудой.

где, m – степень колебательности.
Степень колебательности процесса m – характеризует затухание его колебательных составляющих и численно равна абсолютному значению отношения действительной части к коэффициенту при мнимой части корня характеристического уравнения с наименьшим абсолютным значением этого отношения.
 , i=1,2,3…;
, i=1,2,3…; 
Между степенью затухания  и степенью колебательности m существует определенная связь.
и степенью колебательности m существует определенная связь.


Различным значениям степени затухания соответствуют следующие степени колебательности m.
|
| 0,00 | 0,6 | 0,75 | 0,90 | 0,95 |
| m | 0,00 | 0,414 | 0,221 | 0,336 | 0,478 |
Расширенные частотные характеристики W(m,j  ) получают аналитически из передаточных функций, заменой р на комплексную переменную
) получают аналитически из передаточных функций, заменой р на комплексную переменную  . При этом степень колебательности m обычно принимают равной 0,221 или 0,366, что соответствует степени затухания процесса , равной 0,75 или 0,9, т.е. затуханию процесса за три или два периода колебаний.
. При этом степень колебательности m обычно принимают равной 0,221 или 0,366, что соответствует степени затухания процесса , равной 0,75 или 0,9, т.е. затуханию процесса за три или два периода колебаний.
Последовательность определения параметров настройки
Определяется расширенная частотная характеристика
объекта  с передаточной функции
с передаточной функции

или в показательной форме


Определяется расширенная частотная характеристика пропорционально интегрального (ПИ) регулятора с передаточной функцией.
где, К0 – коэффициент усиления регулятора;
S0=1/TИ, ТИ – время изодрома регулятора.
Знак минус указывает, что действие регулятора направлено против возмущения.

по показательной форме:

Исходным условием для получения заданной степени колебательности замкнутой системы m, а следовательно, определяемой степени затухания является соотношение:

Это соотношение двух комплексных чисел возможно в
том случае, если произведение модулей векторов равно единице, а аргументы (фазы) равны.


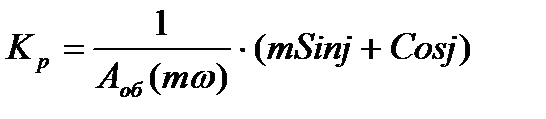
Тогда для АСР с ПИ – регулятором получается:


где,  - расширенная амплитудно-частотная характеристика объекта;
- расширенная амплитудно-частотная характеристика объекта;
 - расширенная фазо-частотная характеристика объекта;
- расширенная фазо-частотная характеристика объекта;
Решая последние уравнения относительно Кр и S0, получают:


где, 
Задаваясь различными значениями частот , рассчитываются настройки Кр и S0, строят линию равной степени колебательности и находят визуально из графика значения  max, а затем
max, а затем  р рабочую частоту и соответствующие ей оптимальные настройки
р рабочую частоту и соответствующие ей оптимальные настройки 
Плоскость параметров настроек ПИ-регулятора.
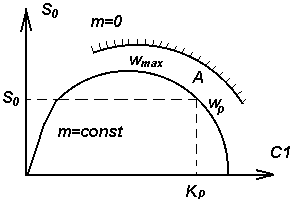
Рис.1.4.
Формулы расчета настроек регулятора с пропорционально- дифференциальным (ПД), пропорциональным (П), пропорционально-интегрально-дифференциальным (ПИД) регуляторами имеют вид:
Пропорциональный (П) регулятор:




Пропорционально-дифференциальный (ПИД) регулятор:



Пропорционально-интегрально-дифференциальный (ПИД) регулятор:



где, 
Для построения семейства линии равной m, задается несколько значений  затем для каждого значения
затем для каждого значения  при различных значениях находятся условно – оптимальные настройки. Для выбора оптимальной настройки необходимо осуществить моделирование АСР с ПИД регулятором и оценить величину критерия I2.
при различных значениях находятся условно – оптимальные настройки. Для выбора оптимальной настройки необходимо осуществить моделирование АСР с ПИД регулятором и оценить величину критерия I2.
В качестве оптимальных настроек выбираются настройки той САР, для которой критерий I2 окажется наименьшим.
Пример:
Определить оптимальные настроечные параметры ПИ-регулятора.
Исходные данные: Объект регулирования представлен передаточной функцией апериодического звена:

К0=571 см/м2; Т0=3657 с; m=0,221;  =0,75.
=0,75.
Решение:
Расширенная частотная характеристика объекта:

Заменим р на комплексную переменную  получаем расширенную амплитудно-фазовую характеристику.
получаем расширенную амплитудно-фазовую характеристику.
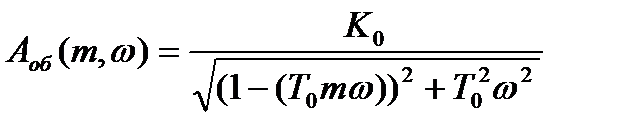
Подставляя численные значения К0, Т0 определяем Аоб  при изменении
при изменении  от 0 до
от 0 до  .
.
| Аоб | 6,11 | 3,06 | 2,03 | 1,53 | 1,27 | 1,02 | 0,76 | 0,51 | 0,38 | |
|
| 0,025 | 0,05 | 0,075 | 0,1 | 0,12 | 0,15 | 0,2 | 0,3 | 0,4 | |
| Аоб | 0,3 | 0,25 | 0,22 | 0,19 | 0,15 | 0,13 | 0,11 | 0,1 | 0,02 | |
|
| 0,5 | 0,6 | 0,7 | 0,8 | 1,2 | 1,4 | 1,6 |
Определим фазо-частотную характеристику объекта

 об
об
| 78,18 | 77,88 | 77,78 | 77,73 | 77,7 | 77,68 | 77,65 | 77,63 | 77,61 | |
|
| 0,025 | 0,05 | 0,075 | 0,1 | 0,12 | 0,15 | 0,2 | 0,3 | 0,4 | |
|
об
| 77,6 | 77,6 | 77,6 | 77,59 | 77,59 | 77,59 | 77,59 | 77,59 | 77,59 | |
|
| 0,5 | 0,6 | 0,7 | 0,8 | 1,2 | 1,4 | 1,6 |
Определяем настройки регулятора
 (1)
(1)
 (2)
(2)
где, 
| j | -89.78 | -88.42 | -88.424 | -88.426 | -88.427 | -88.427 | -88.429 |
|
| 0.025 | 0.05 | 0.075 | 0.1 | 0.12 | 0.15 | |
| j | -88.429 | -88.429 | -88.429 | -88.429 | -88.429 | -88.429 | -88.429 |
|
| 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 |
| j | -88.429 | -88.429 | -88.429 | -88.429 | -88.429 | ||
|
| 1.2 | 1.4 | 1.6 |
Вычисленные значения подставляем в выражения (1) и (2) составляем таблицу и строем кривую с равной m, по нему находим  , а по соотношению
, а по соотношению  , рабочую частоту
, рабочую частоту  и соответствующую ей оптимальные настройки
и соответствующую ей оптимальные настройки  ,
, 
| Кр | 0,002 | 0,014 | 0,149 | 0,224 | 0,229 |
| S0 | 0,0025 | 0,006 | 0,008 | 0,009 | |
|
| 0,025 | 0,05 | 0,75 | 0,1 | |
| Кр | 0,359 | 0,45 | 0,6 | 0,9 | 1,2 |
| S0 | 0,009 | 0,008 | 0,005 | 0,001 | 0,0004 |
|
| 0,12 | 0,15 | 0,2 | 0,3 | 0,4 |
| Кр | 1,5 | 1,8 | 2,1 | 2,4 | |
| S0 | 9,58Е-05 | 1,95Е-05 | 3,77Е-0,6 | 6,97Е-07 | 2,19Е-08 |
|
| 0,5 | 0,6 | 0,7 | 0,8 | |
| Кр | 3,6 | 4,21 | 4,814 | ||
| S0 | 6,32Е-10 | 1,73Е-11 | 4,53Е-13 | ||
|
| 1,2 | 1,4 | 1,6 |



Рис. 1.5.
Дата добавления: 2015-08-17; просмотров: 265 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Экспериментальные методы определения характеристик объекта регулирования | | | Метод незатухающих колебаний |