Читайте также:
|
Современный писатель, фантаст Роберт Хайнлайн считается первым, кто предсказал возможность применения роботов – систем телеслежения в фантастическом романе 1940 года под названием «Валдо». В этом романе человек управляет механическими куклами, называемыми «Валдо», отдавая команды из удаленного места.
Я обнаружил, что вместо использования термина «Валдо» к подобным устройствам более подходит слово «Голем», взятое из еврейской мифологии. История Голема описывает человеческий дух, который намеренно вселяется в глиняную статуэтку. Дух управляет глиняной статуэткой, отдавая ей приказания, которые дух не смог или не хотел бы исполнять в своей «человеческой» форме. Как только работа Голема завершена, дух возвращается в свое человеческое тело. Такое определение очень точно описывает новую науку телеслежения. По этой причине я назвал своего робота – систему телеслежения Голем I.
Что такое телеслежение?
Система телеслежения представляет собой систему дистанционного управления высокой точности, которая делает попытку перенести управляющие действия человека на удаленного робота. Интерфейс обратной связи строит систему телеслежения по образу виртуальной реальности. На рис. 9.1 показаны основные блоки системы телеслежения.
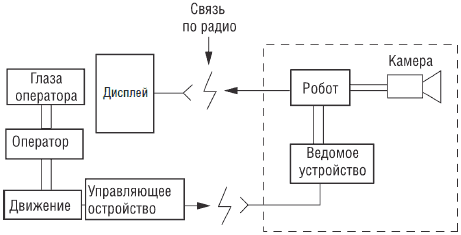
Рис. 9.1. Базовая схема системы телеслежения
В системах виртуальной реальности мы достигаем погружения в синтетическую, сгенерированную компьютером реальность, пользуясь иллюзией «обмана» чувств, что приводит к организации взаимодействия с этой синтезированной реальностью и вере в ее «существование». В системе телеслежения окружающий мир реален, но находится на определенном удалении. Таким образом, вместо компьютерно созданной искусственной реальности, сенсорные устройства, установленные на удаленном роботе, предоставляют оператору необходимую информацию об окружающей пространственной среде, как если бы он или она непосредственно находились в данном месте.
На стороне оператора, как уже говорилось, имеется оборудование типа виртуальной реальности, которое обеспечивает отображение достаточной информации от удаленных сенсорных устройств для того, чтобы чувства оператора «поверили», что данная среда является реальной и присутствующей «здесь». Достигнутый уровень «присутствия» зависит от точности и верности информации, передаваемой через интерфейсы. Человекоподобный робот, который может точно следовать человеческим движениям, жестам, перемещениям, сохранять равновесие и при этом обладает способностью передавать оператору зрительные, тепловые, тактильные и мышечные ощущения, возникающие в его искусственном «скелете», будет являться совершенным Големом. При этом должна возникнуть иллюзия сращивания или полного погружения человека-оператора в структуру робота.
Существующие системы телеслежения решают гораздо более скромные задачи. Во многих случаях такой робот представляет собой повозку типа той, которую мы собираемся построить. Лучшие образцы подобных устройств позволяют добиться иллюзии, что он или она управляют движением повозки, находясь внутри нее.
Подобные роботы могут создаваться для исследования или работы в суровых или вредных для здоровья условиях. Список подобных условий может включать воды Арктики, океанское дно, лесные пожары, действующие вулканы, ядерные реакторы, поверхность Луны, Марса и т. д.
Дата добавления: 2015-08-17; просмотров: 50 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Соревнования ВЕАМ-роботов | | | Подструктура системы |