|
Читайте также: |
В моем прототипе устройства использованы CdS фоторезисторы с темновым сопротивлением порядка 100 кОм и сопротивлением на свету порядка 10 кОм. Наилучшим местом для закрепления фоторезисторов является верхняя часть 100:1 редуктора ходового двигателя (см. рис. 8.13). Для крепления фоторезисторов я использовал небольшую пластиковую пластинку, закрепленную под углом 45° вверх и светонепроницаемый козырек, помещенный между фоторезисторами (см. рис. 8.14). Закрепление фоторезисторов на площадке переднего колеса автоматически обеспечивает совпадение направления приема светового излучения с направлением движения. Такой тип повторяет конструкцию оригинальной черепахи робота.
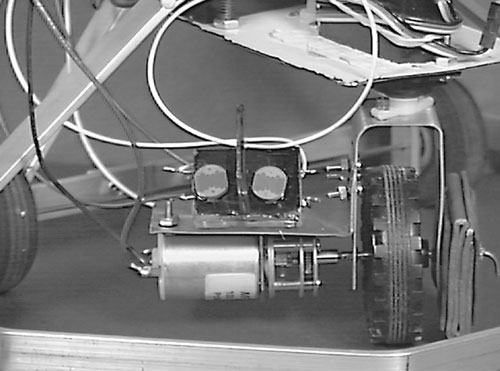
Рис. 8.13. Детальная фотография конструкции узла переднего ведущего колеса, содержащая противовес, ведущее колесо, двигатель с редуктором и датчики освещенности
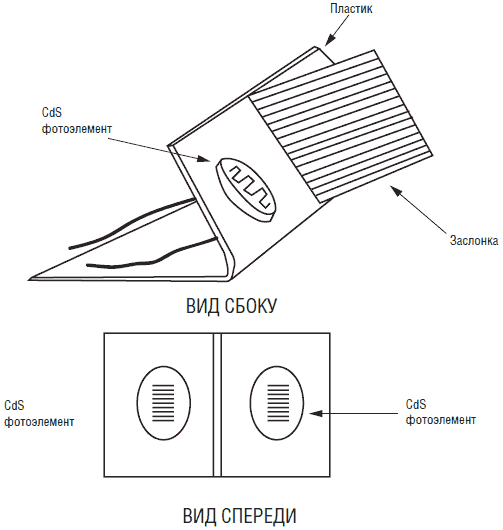
Рис. 8.14. Изометрический вид блока датчиков
Использование двух CdS фоторезисторов сильно облегчает вычисления, необходимые для решения задачи следования за источником света. Для этого требуется алгоритм, аналогичный алгоритму действия устройства системы слежения за направлением источника света, описанный в гл. 6. Работа блока фоторезисторов проиллюстрирована на рис. 8.15. Когда оба датчика освещены одинаково, то их сопротивления приблизительно равны. Если разность показаний каждого их датчиков не превышает ±10 единиц, программа PIC полагает их равными и не отдает команду на устройство поворота. Когда один из датчиков попадает в тень источника света, то разность сопротивлений превышает ±10 единиц. Соответственно PIC микроконтроллер включает устройство поворота для обеспечения равной освещенности датчиков. При этом переднее колесо поворачивается, и робот движется прямо к источнику света. Если освещенность превышает пороговую, то робот переходит в режим «избегания».
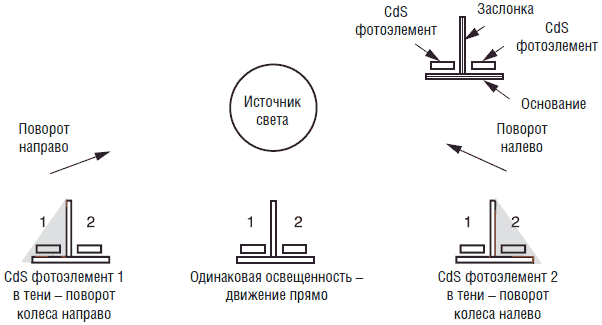
Рис. 8.15. Функциональное реагирование блока датчиков
Дата добавления: 2015-08-17; просмотров: 53 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Выключатель бампера | | | Принципиальная схема |