Читайте также:
|
Робот-платформа, управляемый голосом, изображен на рис. 7.7. Плата управления немного отличается от изображенной на рис. 7.4. Причиной этого является то, что мне удалось достать прототип последней версии набора УРР.

Рис. 7.7. Модель автомобиля с голосовым управлением
Последняя версия упрощает построение интерфейса для УРР. Для удобства соединения в плате имеются 9 монтажных пистонов (8 отверстий под 2 полубайта двоично-десятичного кода и отверстие под землю), которые соединены с выходом ИС 74LS373, расположенной на плате. Старший полубайт выхода 74LS373 управляет работой ИС 4028. Запускающий сигнал можно снимать с выводов красного светодиода.
В дополнение к изменениям схемы интерфейса на плате имеется вход 3. В для обновления памяти. Такое включение делает статическую ОП энергонезависимой. Иными словами, вы можете подавать или снимать питание с платы без потери информации о ключевых словах, записанной в ОП. В оригинальной версии выключение питания приводило к потере информации, записанной в ОП.
Проект 3: общая схема интерфейса УРР
Интерфейс УРР для робота-передвижки является специализированной схемой, предназначенной для конкретной цели. Следующая схема интерфейса (см. рис. 7.8) представляет собой более универсальное устройство, дающее возможность управлять целым набором устройств, таких как роботы, электрические схемы и приборы.
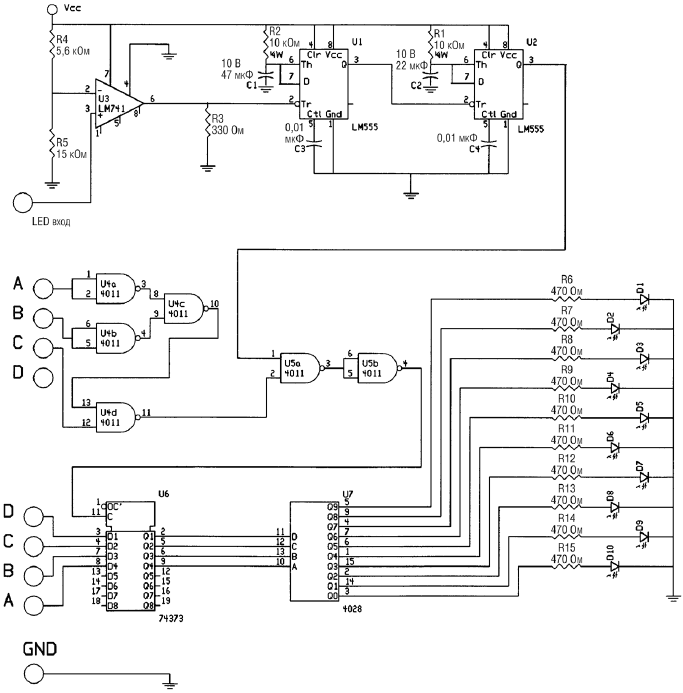
Рис. 7.8. Общая схема интерфейса для УРР
Для того чтобы сильно не усложнять схему и в то же время повысить надежность и точность распознавания системы УРР, мы снова ограничимся списком из 10 управляющих команд. Если вы хотите расширить этот список до полных 40 команд, то можете спроектировать интерфейс на основе идей, изложенных в этой главе. Использование 10 ключей управления позволяет нам использовать для каждого ключа 4 возможных варианта распознавания, как мы уже делали выше. Каждый из четырех вариантов распознавания, связанный с ключевым словом, позволяет запоминать различные варианты произнесения ключевого слова. Понятно, что четыре варианта произношения для каждого ключевого управляющего слова позволят повысить надежность и точность распознавания УРР.
Мы будем нумеровать места команд, как мы это делали выше, поэтому все места, соответствующие одному и тому же ключевому слову, будут иметь соответственно одинаковый младший десятичный разряд. Принцип записи будет ясен из примера.
Предположим, что мы проектируем электрическое кресло-каталку с голосовым управлением. Для управления движением кресла мы будем использовать следующий список команд:
• Вперед
• Назад
• Направо
• Налево
• Стоп
• Выключить
• Включить
• Блокировать
• Разблокировать
• Стоп (Команда «стоп» является жизненно важной, поэтому требует дублирования)
Первой командой для обучения распознавания УРР является «вперед». Мы будем использовать номера ячеек 10, 20, 30 и 40. При исключении старшего десятичного разряда в каждом номере мы получим одинаковое значение младшего десятичного разряда, равное 0. Точно так же команда «назад» записывается в ячейки 01, 11, 21 и 31. После исключения старшего десятичного разряда мы получим номер команды равный 1.
Интерфейс должен опознавать коды ошибок и не смешивать их с командами под номерами 5, 6 и 7. Для этого используется схема, состоящая из двух ИС И-НЕ типа 4011, включенных по схеме логических И и ИЛИ (как показано на рис. 7.8), которая обнаруживает коды ошибок 55, 66 и 77.
Дата добавления: 2015-08-17; просмотров: 39 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Устройство РР, независимое от говорящего | | | Принцип работы устройства |