Читайте также:
|
Для поворота блока датчиков в сторону источника света устройство использует двигатель постоянного тока с редуктором (см. рис. 6.34). Коэффициент замедления редуктора 4000:1. Вал редуктора имеет скорость примерно 1 оборот в минуту. При повторении конструкции для поворота блока датчиков рекомендуется использовать двигатель с редуктором, имеющим подобные характеристики.

Рис. 6.34. Фотография конструкции устройства слежения в сборе
Блок датчиков прикреплен (приклеен) к валу редуктора двигателя. Двигатель через редуктор может поворачивать блок по часовой стрелке или против часовой стрелки в зависимости от направления тока, протекающего через двигатель.
Для обеспечения реверсирования направления вращения двигателя необходимо устройство, обеспечивающее протекание тока в обоих направлениях. Для этой цели мы используем мостовую схему. В мостовой схеме используются четыре транзистора (см. рис. 6.35). Рассмотрим каждый транзистор как простой ключ, как показано в верхней части рисунка. Схема названа мостовой, поскольку транзисторы (ключи) включены нее в виде моста.
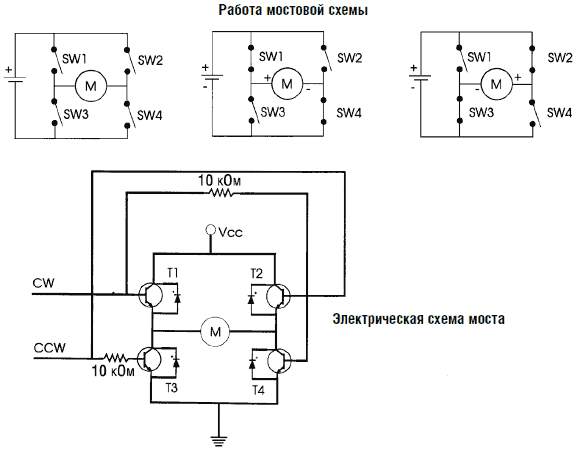
Рис. 6.35. Работа мостовой схемы и ее устройство
При замыкании ключей SW1 и SW4 двигатель вращается в одном направлении. При замыкании ключей SW2 и SW3 двигатель вращается в противоположном направлении. Если ключи разомкнуты, то происходит остановка двигателя.
Управление мостом осуществляется с помощью PIC микропроцессора. Мостовая схемы включает в себя четыре NPN транзистора типа 120 Darlington, четыре диода типа 1N514 и два резистора 10 кОм 0,25 Вт. Вывод 0 подключен к транзисторам Q1 и Q4. Вывод 1 подключен к транзисторам Q2 и Q3. Сигналами на выводах 0 и 1 открываются соответствующие транзисторы и двигатель вращается по или против часовой стрелки соответственно данным блока датчиков. Обратите внимание на правильность подключения резисторов 10 кОм, в противном случае схема не будет работать.
Транзисторы TIP 120 Darlington изображены на схеме как обычные NPN транзисторы. Во многих схемах моста в «верхней» части используются транзисторы PNP проводимости. Сопротивление PNP транзисторов немного выше. Таким образом, если мы используем только NPN транзисторы, то КПД устройства несколько увеличится.
Диоды
Для предотвращения выбросов напряжения, которые могут привести к сбросу или зависанию PIC микропроцессора, используются защитные диоды, включенные между эмиттером и коллектором каждого транзистора (от Q1 до Q4). Эти диоды гасят всплески напряжения, возникающие при включении и выключении обмоток двигателя.
Программа на PICBASIC имеет следующий вид:
‘Программа нечеткой логики для системы слежения
start:
low 0 ‘Низкий уровень шины 0
low 1 ‘Низкий уровень шины 1
pot 2,255,b0 ‘Чтения показаний фотоэлемента 1
pot 3,255,b1 ‘Чтение показаний фотоэлемента 2
if b0 = b1 then start ‘Если показания равны, то ничего не делать
if b0 > b1 then greater ‘Если больше, то насколько
if b0 < b1 then lesser ‘Если меньше, то насколько
greater: ‘Процедура больше
b2 = b0 – b1 ‘Определение разницы показаний
if b2 > 10 then cw ‘Внутри границ? Если нет, перейти на cw
goto start: ‘Если внутри границ, измерять снова
lesser: ‘Процедура меньше
b2 = b1 – b0 ‘Определение разницы показаний
if b2 > 10 then ccw ‘Внутри границ? Если нет, перейти на ccw
goto start: ‘Если внутри границ, измерять снова
cw: ‘Поворот блока по часовой стрелке
high 0 ‘Включить мост
pause 100 ‘Вращение 0,1 с
goto start ‘Новая проверка
сcw: ‘Поворот блока против часовой стрелки
high 1 ‘Включить мост
pause 100 ‘Вращение 0,1 с
goto start: ‘Новая проверка
Дата добавления: 2015-08-17; просмотров: 55 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Нечеткая логика | | | Выход, не использующий нечеткую логику |